Б.И.Голдовский
О законах построения технических систем
ТРИЗ нужна России: проблемы технического творчества. Сб. ст.выпуск 2.
– Чебоксары: Новое время, 2018 – стр. 54 - 72
Перечень законов развития технических систем (ТС), предложенный Г.С.Альтшуллером [1], был разделен достаточно искусственно и условно на законы «статики», «кинематики» и «динамики». Шаг к естественной классификации этих законов был сделан в начале 80-х годов В.М.Петровым, который законы «статики» назвал «законами организации» (т.е. построения), а законы «кинематики» и «динамики» объединил в «законы эволюции» (т.е. развития) [2], [3] (очевидно с использованием более ранних своих разработок на эту тему). Практически в это же время автор настоящей статьи тоже выполнил разработку системы закономерностей построения и развития технических систем [4]. Цель разработки была простая: разобраться в данной теме. В результате были отмечены три основных момента:
- система закономерностей на самом деле гораздо более сложная, чем список, приведенный в [1];
- часть закономерностей можно обосновать дедуктивно;
- из системы закономерностей необходимо выделить законы построения ТС, обеспечивающие работоспособность ТС, поскольку закономерности развития работают в рамках законов построения.
Последний тезис, как методологически важный, был опубликован в 1983 году в тезисах конференции [5] (см. также [6]), делались также попытки обратить на него внимание при последующих публикациях. Но безуспешно. Это вполне объяснимо, поскольку основные работы специалистов ТРИЗ по законам построения и развития технических систем были сосредоточены главным образом на описании законов, их классификации и подборе примеров [7], [8]. Вопрос механизмов действия законов, для которого данный методологический тезис мог быть важным, не рассматривался.
Подобное явление достаточно типично для развития любого научного знания. Как отмечено в [9]: «Наука движется как бы спиной к будущему; она пятится вперед и позволяет нам обозревать пройденную дорогу. Тот, кто движется быстрее и обгоняет своих современников, выпадает из поля зрения».
В 2017 году в статье [10] Н.А.Шпаковский, примеряя систему законов В.М.Петрова к процессу создания и развития ТС, назвал законы организации главными, а законы эволюции вспомогательными. Такое деление не совсем корректно, поскольку у этих законов разные области действия. Однако сам факт выделения особой роли законов построения ТС правилен. В чем же заключается особенность законов построения ТС?
Известно, что все ТС входят в две системы отношений: природы и общества (человеческого социума). Они создаются социумом для нужд человека, но с использованием природного субстрата. Применительно к техническим противоречиям это было показано в [11]: отношения взаимообусловленности сторон противоречия определяется природным субстратом (поэтому эти отношения безусловны), а отношения противоположности определяются оценками со стороны социума (поэтому относительны, не безусловны). Подобная картина получается и применительно к законам построения и развития ТС.
Следует отметить, что закон – категория принуждающая. Любой безусловный закон должен наказывать за неисполнение своих предписаний. В этом плане законы построения ТС существенно отличаются от законов развития (по своей сути и механизму действия). Законы построения ТС как отражение природного субстрата техники безусловны: их нарушение сразу приводит к неработоспособности ТС (то есть наказание за их нарушение неотвратимо). Законы развития отражают влияние социума на технику и, так же как и законы социума, не безусловны. Их нарушение не порождает немедленное наказание, хотя и уводит развитие ТС с оптимальной траектории. Поэтому выявление механизма, заставляющего следовать законам развития ТС при совершенствовании техники, задача достаточно сложная. И ей надо заниматься. В то же время безусловность действия законов построения ТС делает их инвариантными к любым преобразованиям ТС. Соответственно они могут служить для контроля правильности преобразований и, как любое существенное ограничение, могут влиять на механизм действия законов развития ТС.
Приведенные положения относятся к теоретическому знанию, которое, в отличие от прикладного, не пользуется спросом у большинства специалистов ТРИЗ (по мнению автора, [12]). В прикладном плане законы построения ТС применимы в первую очередь при синтезе ТС. Однако из-за существенной обобщенности их инструментальность уступает многочисленным закономерным правилам построения работоспособных ТС, которые составляют суть инженерных дисциплин в различных областях техники. В то же время именно общий характер законов построения ТС делает их достаточно универсальными. Причем отдельные следствия из этих законов имеют самостоятельную прикладную ценность.
Законы построения ТС с разной степенью подробности описаны во многих источниках, например, в [7], [13], [14], [15], [16], [17]. Тем не менее, представляется целесообразным компактно изложить эту тему с учетом наработок, выполненных в разные годы.
Основным системообразующим фактором для ТС является ее главная полезная функция (ГПФ), соответствующая некоторой потребности социума. В свою очередь, реализация ГПФ требует выполнения ряда функций меньшего уровня общности - элементарных полезных функций (ЭПФ). Например, для транспортного средства с ГПФ «осуществление транспортировки груза по водной поверхности» должны быть реализованы следующие ЭПФ:
- обеспечение размещения и удержания груза во время транспортировки;
- обеспечение удержания транспортного средства на поверхности воды;
- обеспечение перемещения транспортного средства по поверхности воды;
- управление перемещением транспортного средства.
Для реализации ЭПФ в системе должны быть предусмотрены соответствующие подсистемы. То есть должна быть обеспечена функциональная полнота ТС: в системе должны быть реализованы все подсистемы, обеспечивающие выполнение ГПФ.
Указанные ЭПФ составляют первый уровень декомпозиции ГПФ, их состав остается неизменным при любом изменении принципов действия отдельных подсистем. Такая устойчивость состава ЭПФ первого уровня и соответствующих подсистем ТС делает их инвариантом и маркером определенной группы (класса) технических средств, входящих в определенную функциональную нишу, соответствующую ГПФ.
Выполнение ГПФ и соответствующих ЭПФ обеспечивается за счет структуры ТС, представляющей собой элементы природного субстрата, взаимодействующие друг с другом определенным образом. Именно за счет того, что при взаимодействии элементов реализуются не все их свойства, а только некоторые, а также за счет определенного комбинирования свойств при взаимодействии и образуется особое системное свойство, не сводимое к сумме свойств входящих в структуру элементов. Одновременно это порождает также структурную избыточность ТС [18].
Число и состав элементов, входящих в структуру, не совпадает с числом и составом функциональных подсистем, поскольку некоторые элементы могут входить в состав нескольких подсистем.
Функциональной полноте ТС должна соответствовать структурная полнота системы, предполагающая, что состав элементов и взаимодействий между ними должен быть достаточен для выполнения всех присущих системе элементарных функций. Данное определение структурной полноты достаточно тривиально. Поэтому целесообразно обратиться к представлению функционирования как процесса соответствующих преобразований природных потоков (вещества, энергии и информации). Подобное представление соответствует известному из кибернетики структурному звену, состоящему из преобразователя (черного ящика) с входами и выходами (причем один из входов может быть управляющим). Представление функционирования через преобразование потоков принято, например, в известной работе Р.Коллера [19].
В соответствии с этим представлением закон структурной полноты ТС может быть сформулирован следующим образом: состав элементов структуры и взаимодействия между ними должны обеспечивать прохождение природных потоков (вещества, энергии и/или информации) к нужным частям системы и такое преобразование этих потоков, которое обеспечит выполнение всех элементарных функций системы.
Приведенное определение относится к так называемым динамическим системам (машинам, приборам и аппаратам), в которых реализуются существенные для человека природные процессы, обеспечивающие функционирование ТС. Однако существуют и сооружения, которые принято считать статическими. Правда, в [16] было показано, что деление на статические и динамические системы в определенной степени условно. Тем не менее, опираясь на существенность или несущественность динамических процессов, сооружения можно отличить от машин, приборов и аппаратов. В [13] было показано, что и в сооружениях можно найти аналог потоков – это картина распределения напряжений и/или деформаций. Например, картина распределения напряжений в металлической пластине переменного поперечного сечения с вырезами и вварышами при ее растяжении весьма близка к картине распределения скоростей потока невязкой жидкости в трубопроводе, имеющем аналогичное изменение поперечного сечения, а также аналогичные детали, препятствующие потоку. То есть, в принципе потоковый подход может быть применен и к сооружениям. Соответственно к сооружениям также может быть применена формулировка структурной полноты.
В ТРИЗ потоковый подход был впервые предложен Ю.И.Хотимлянским [20]. Применительно к энергопотокам был предложен принцип сквозного прохода энергии («необходимым условием функционирования ТС является сквозной проход энергии по всем объектам системы»), а также предложено выделять два вида преобразования энергии (по виду и по программе (параметрически)). Это в известной степени упрощало потоковое моделирование, в отличие от подхода Р. Коллера, который предложил перечень из 12 групп физических элементарных функций, каждая из которых включала прямую и обратную функцию.
Следует отметить, что в инженерном деле построение интегральных потоковых структур (особенно на самых ранних стадиях разработки) не редкость. Например, на подводном аппарате в качестве источников энергии используют электрические аккумуляторы и сжатый воздух. Потребителям электрической энергии необходим ток разной природы (постоянный и переменный, с разной величиной напряжения). Также потребителям сжатого воздуха нужен поток воздуха с разным давлением (высокого, среднего и низкого давления). Кроме того, для ряда потребителей необходим поток гидравлической жидкости под давлением, для создания которого используется электрическая энергия и сжатый воздух. Необходимо также перемещать в аппарате морскую воду. Естественно, для того, чтобы наглядно представить себе все требуемые потоки и преобразования энергии, составляется укрупненная структурная схема на основе представления о преобразователях как о черных ящиках с входами и выходами. Имея подобный опыт, на основе подхода, предложенного Ю.И.Хотимлянским, в составе Комплексного метода поиска новых технических решений удалось разработать достаточно целостный аппарат структурного синтеза и преобразования, которым удалось заменить также и вепольный анализ [21], [13]. При этом моделировались энергетические цепочки, поскольку энергетическая составляющая есть и в потоках вещества, и в потоках информации.
Закон структурной полноты в потоковом представлении объединяет в себе два традиционных закона построения ТС «Полноты» и «Энергетической проводимости», приведенные в [1]. Следует отметить, что формулировки указанных законов фактически соответствуют некоторым частным случаям. В реальности картина получается более сложной. И состав структуры даже в обобщенной форме во многом зависит от ее назначения. Типовые обобщенные функциональные структуры (для машин, информационных систем и сооружений) приведены, например, в [17]. Примеры энергоцепочек различного назначения представлены в [13].
Наибольшее влияние на структуру системы оказывают принципы действия подсистем, то есть те природные процессы, эффекты и явления, совокупность которых обеспечивает выполнение полезных функций системы. Принцип действия не может быть определен только на основе функции, сформулированной на качественном уровне. Как было показано выше, функциональная ниша включает в себя несколько технических систем, отличающихся принципами действия. Для конкретизации кроме качественного описания функции необходимо указывать и ее количественные характеристики (параметры). То есть функциональную нишу можно разделить на ряд более мелких функционально-параметрических ниш, в каждой из которых располагается конкретная ТС со своими количественными параметрами и соответствующими принципами действия подсистем [13].
Следует отметить, что учет количественных параметров ТС находится на периферии ТРИЗ. Это вполне объяснимо, поскольку в формулах изобретений количественные показатели чаще всего отсутствуют. Однако при таком отношению к количеству в ТРИЗ фактически не работает закон перехода количественных изменений в качественные, хотя в публикациях о законах развития ТС он декларируется (см., например, [7]). Соответственно из практики выпадают такие категории, как, например, существенность и обострение противоречия.
Нишевое представление принципов действия ТС – не редкость. В [13], например, показано распределение принципов действия транспортных средств по нишам с параметрами скорость и масса. Аналогичные зависимости представлены на рис. 1 и 2 для электрических аккумуляторов.
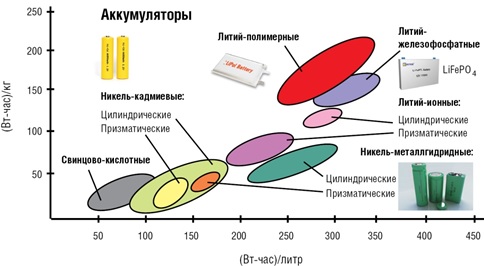
Рисунок 1 – Распределение разных типов электрических аккумуляторов по нишам с параметрами удельной энергии на единицы массы и объема
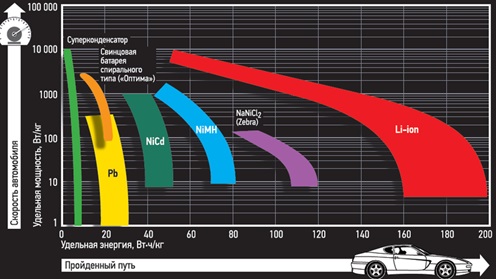
Рисунок 2 – Распределение разных типов тяговых электрических аккумуляторов (накопителей электрической энергии) по нишам с параметрами удельной мощности и удельной энергии (на единицу массы)
Подобное распределение по нишам имеют и конструкционные материалы. К примеру, на рис. 3 представлена зависимость распределения материалов для емкостей по соответствующим параметрическим нишам.

Рисунок 3 – Распределение разных типов материалов для емкостей по нишам с параметрами допустимого абразивного износа и количества циклов нагрузки
Таким образом, можно считать, что для сооружений смена материала фактически аналогична смене принципа действия.
В отличие от функции (ГПФ, ЭПФ), которая является отражением целей (потребностей) социума, принцип действия относится к природному субстрату, являющемуся средством выполнения функции. Поэтому ТС как определенный вид технических средств (аналогично биологическому виду) целесообразно определять, как сочетание (единство) ГПФ и принципа действия основной (центральной) подсистемы. Под последней понимается такая подсистема, ЭПФ которой отличает группу (класс) ТС, объединяемых общей ГПФ, от аналогичных систем. Например, для систем с ГПФ «осуществление транспортировки груза по водной поверхности» основной (центральной) будет подсистема, обеспечивающая выполнение ЭПФ «удержание транспортного средства на поверхности воды», поскольку остальные ЭПФ характерны практически для всех ТС, обеспечивающих транспортировку груза.
Нишевое представление принципов действия достаточно полезно, во-первых, потому, что дает достаточно полное представление о реальных возможностях тех или иных технологических эффектов. Во-вторых, работа с функционально-параметрическими нишами требует выделения действительно существенных параметров, количественно характеризующих возможности принципов действия по выполнению функций. В-третьих, если причиной возникновения существенного нежелательного эффекта (НЭ) является изменение количественного показателя, определяющего границы ниши, то, скорее всего, необходима смена принципа действия (то есть перехода к новому виду ТС).
Количественные характеристики функционирования являются не менее важными, чем качественные. Если обобщить условия приемлемости ТС для социума в части функционирования, приведенные, например, в [13], [15] и [22], то получим следующий набор условий:
- главная полезная функция (ГПФ) ТС качественно (по содержанию) и количественно должна соответствовать требованиям социума и/или технического окружения;
- должна быть обеспечена устойчивость функционирования (включая надежность работы и стойкость к внешним воздействиям);
- должна быть обеспечена требуемая степень управляемости процессом функционирования;
- должно быть обеспечено удобство взаимодействия человека с ТС (включая удобство управления), если такое взаимодействие предусмотрено.
В тех случаях, когда происходит дальнейшее развитие ранее созданной и уже работающей ТС, количественные характеристики функционирования задаются, так сказать, в рабочем порядке, на основе анализа потребностей социума и технического окружения. В тех случаях, когда ТС создается впервые (пионерная разработка), полезно помнить о необходимости преодоления параметрических порогов, характеризующих работоспособность системы [13]. Физический параметрический порог определяет условия устойчивого функционирования системы. Например, для того, чтобы самолет мог уверенно летать, величина максимального значения создаваемой подъемной силы должна на 10-20% превышать вес самолета. А у любого надводного судна в полном грузу должна оставаться часть корпуса, не погруженная в воду (надводный борт), что обеспечивает живучесть судна при различных внешних воздействиях. Функциональный параметрический порог определяет тот уровень количественных параметров функционирования, при котором создаваемое техническое средство уже можно не считать только демонстрационным аттракционом. Например, речной пароход становится реальным транспортным средством, если он сможет на одной заправке топлива преодолеть против течения как минимум расстояние между двумя пристанями. А наглядным признаком того, что самолет встал в ряд работоспособных транспортных средств, в свое время стал перелет Блерио через Ла-Манш.
Одним из безусловных закономерных условий работоспособности ТС является обеспечение определенного минимально необходимого уровня согласованности структуры ТС. В [14] было показано, что согласованность структуры является неотъемлемым системным свойством. Несогласованные системы не работоспособны. При этом предлагалось разделить процесс согласования ТС на два этапа: начальный этап, обеспечивающий работоспособность – «пороговое согласование», и дальнейшее «оптимизационное согласование». Пороговое согласование конечно во времени (считается выполненным при достижении работоспособности ТС), а количественные условия порогового согласования имеют вид неравенств («не менее», «не более»). Оптимизационное согласование может продолжаться в течение всего цикла существования ТС, а количественные условия оптимизационного согласования имеют вид уравнений (равенств). Чтобы не использовать лишним образом такой многозначный термин как «согласование», можно процесс начального (порогового) согласования обозначить термином «сопряжение», применяемым в эволюционной биологии [23]. При осуществлении сопряжения обязательно согласовывается структура с функцией, а также взаимодействия элементов структуры между собой качественно и количественно.
В результате сопряжения обеспечивается соответствие структуры и функции ТС, что является достаточно важным безусловным законом построения. Можно отметить, что в [17] этот закон формулируется как «соответствие функции и структуры», причем на доказательство объективности указанного соответствия обращено особое внимание. Данный факт можно объяснить тем, что переход от функции к структуре, как и любой переход от цели к средству, является процедурой синтеза, которая в принципе не однозначна по результату. Однозначный переход от функции к структуре возможен только в тривиальных (стереотипных) случаях и практически не встречается при поиске новых решений. В то же время переход от структуры к функции является аналитической процедурой с однозначным результатом: какова структура, каковы состав и взаимодействие элементов, таковы и функции, выполнение которых обеспечивается данной структурой. При этом в рамках однозначно установленного соответствия структуры и функции правомерным является и тезис о соответствии функции и структуры.
В любом случае, из этого закона имеется важное следствие: соответствие между сложностью функции и структуры. Одним из проявлений этого соответствия является сформулированный Р.У.Эшби «принцип необходимого разнообразия» – разнообразие управляющей системы должно быть не меньше разнообразия объекта управления [16]. Согласно данному принципу, с увеличением сложности объекта управления сложность управляющей системы также должна увеличиваться.
На основе указанного следствия можно сформулировать закон сохранения сложности, который проявляется главным образом в процессе развития ТС. В соответствии с этим законом упростить структуру системы произвольным образом нельзя. Необходимо либо упростить функцию системы (уменьшить ее объем), передав часть функций в надсистему, либо, при сохранении сложности функции, перевести сложность внутри структуры на другие системные уровни (усложнить функции отдельных элементов – «функционально - идеальное свертывание» или перевести сложность на микроуровень, усложнив используемую форму движения материи - «изменение принципа действия подсистемы»).
Действием этого закона вполне объясняется такое известное в ТРИЗ явление, как «волна идеальности». На начальной фазе этой волны из-за дифференциации функционирования в пространстве и во времени в соответствии с действием закона повышения степени идеальности происходит соответствующее усложнение структуры системы. Это усложнение приводит к снижению надежности функционирования системы (НЭ), что с определенного момента инициирует упрощение структуры. Формы достижения требуемого упрощения (переход в надсистему, переход к «идеальному» веществу и др.) [24] вполне соответствуют действию закона сохранения сложности [13].
В процессе сопряжения элементов в структуре ТС необходимо также обеспечить минимально необходимый для работоспособности уровень управляемости системы. Как уже отмечалось, например, в [16], управлять можно лишь динамичной системой, то есть такой системой, которая может во времени принимать различные состояния в области, определяемой присущими данной системе степенями свободы. Однако не все динамичные системы требуют наличия управления. Управление, как целевое воздействие на систему, обеспечиваемое соответствующей подсистемой, необходимо, если выполняются следующие условия:
- система в части некоторых своих состояний является динамичной;
- возникает необходимость приведения системы в некоторое определенное состояние из числа возможных (и/или удержание ее в этом состоянии);
- приведение системы в требуемое состояние невозможно за счет основного процесса функционирования.
Например, если некоторый объект устанавливают на амортизаторах для предотвращения распространения потока вибрации, то он приобретает множество степеней свободы и становится динамичным. В большинстве случаев поддерживать какое-то определенное состояние из возникшего множества возможных просто не требуется: все эти состояния считаются допустимыми. В ряде случаев, когда применяется низкочастотная («мягкая») амортизация, возникает необходимость ограничивать величину перемещений объекта в некоторых эксплуатационных ситуациях. В этом случае чаще всего в дополнение к низкочастотным амортизаторам ставят еще и высокочастотные («жесткие») амортизаторы, которые включаются в работу после превышения определенной величины перемещений объекта (за счет того, что объект просто входит в контакт с «жесткими» амортизаторами). При этом специальных управляющих воздействий не требуется. Однако встречаются такие условия эксплуатации, при которых любые перемещения объекта не допустимы. При этом возникает необходимость в целевом отключении амортизации, что осуществляется за счет введения соответствующей подсистемы управления (обеспечивающей, например, выдвижение жестких упоров).
Следует отметить, что потребностям общества соответствует необходимость перевода объекта в некоторое состояние и/или удержание этого состояния. Целевое управление с использованием соответствующей специальной подсистемы для этого – это лишь средство (причем чаще всего вынужденное). Поэтому с целью обеспечения работоспособности ТС необходимо выделять в первую очередь такие управляющие действия, без которых система действительно не сможет функционировать.
Поскольку для большинства ТС характерен некоторый процесс, обеспечивающий функционирование, то обязательно необходимыми управляющими воздействиями в таких случаях являются операции запуска и остановки процесса функционирования. Другие необходимые управляющие воздействия определяются особенностями функционирования и принципами действия подсистем. Например, для паровой турбины минимально необходимый уровень управляемости может быть обеспечен за счет подсистемы, обеспечивающей подачу потока пара и прекращение этой подачи. Если функция турбины предусматривает изменение и/или стабилизацию частоты вращения, то для обеспечения работоспособности необходимо будет добавить соответствующую управляющую подсистему. Подобная картина наблюдается и для паровой машины. Однако поскольку принцип ее действия предполагает циклическое перемещение поршня с соответствующим изменением потоков рабочего и отработанного пара, в паровой машине обязательно должна присутствовать еще и подсистема управления указанными потоками (синхронно с перемещением поршня).
В ряде случаев особый динамизм некоторых параметров системы, требующий целевого управления, обусловлен влиянием среды, в которой функционирует ТС. Например, надводное судно может перемещаться и поворачиваться по всем трем осям. Однако перемещения по вертикали, а также углы поворота относительно горизонтальных осей (крен и дифферент) определяются главным образом воздействием водной среды и ограничены действием земной гравитации. А повороты вокруг вертикальной оси (по углу курса) никаких природных ограничений не имеют. Поэтому на судах приходится устанавливать подсистему управления углом курса.
Синтез управляющей подсистемы следует начинать, как правило, с определения типа воздействия на динамичный объект или его часть, которое позволит перевести объект в требуемое состояние. Затем под этот тип воздействия на объект подбирается принцип действия управляющей подсистемы с учетом ресурсов, имеющихся в системе и/или в ее окружении. Обращаясь снова к примеру, с надводным судном, получаем, что для поворота судна по углу курса вокруг вертикальной оси на судно необходимо подействовать моментом, действующим в горизонтальной плоскости. Для движущегося судна одной из наиболее простых возможностей создания такого момента является создание поперечной гидродинамической силы в одной из оконечностей корпуса судна (более эффективно создавать такую силу в корме). Для создания требуемой гидродинамической силы в воду поместили крыло (пластину), которое могло поворачиваться относительно вертикальной оси, создавая требуемый угол атаки и, соответственно, требуемую величину силы и момента. А для поворота этого крыла (руля) в состав системы управления должен быть как минимум включен привод, который в свою очередь должен быть управляемым со стороны человека.
Если состояние объекта изменяется за счет определенных преобразований некоторого потока, то для управления изменением этого преобразования одно из структурных звеньев, через которое проходит поток, должно обеспечивать необходимые воздействия на поток, а само структурное звено, в свою очередь, должно быть восприимчивым к соответствующему целевому управляющему воздействию (то есть быть изменяемым).
В [17] в качестве законов построения упоминаются законы симметрии технических объектов, в соответствии с которыми технический объект, испытывающий определенное существенное воздействие среды в виде потоков вещества, энергии или информации, имеет определенный тип симметрии, обусловленный комбинацией и характером этих потоков. Действительно, большинство транспортных средств, например, имеют симметрию относительно вертикальной плоскости, ориентированной по направлению движения этих транспортных средств. Это обусловлено наличием земной гравитации, действующей сверху вниз, и отсутствием подобной стратификации воздействий в горизонтальной плоскости. Однако данное явление следует считать не законом, а закономерной тенденцией, поскольку известны исключения, в соответствии с которыми как раз отступление от симметрии при симметричном и однородном воздействии среды позволяет оптимизировать ТС (см., например, [25]). Тем не менее, правила, приведенные в [17], заслуживают внимания, изучения и включения в орбиту ТРИЗ.
Любая симметрия по факту есть ограничение разнообразия. То есть при однообразности воздействий окружения или функций соответствующее уменьшение разнообразия реализуется и в структуре. То есть здесь мы имеем дело с проявлением закона соответствия между структурой и функцией.
Источники
1. Альтшуллер Г.С. Творчество как точная наука. – М.: Советское радио, 1979
2. Петров В.М. Система законов развития ТС. – Доклад на семинаре преподавателей и разработчиков ТРИЗ (Петрозаводск-82). –Л.: 1982.
3. Петров В.М. Закономерности развития технических систем // Методология и методы технического творчества. Тезисы докладов и сообщений к научно-практической конференции. – Новосибирск: АН СССР СО, 1984. – С. 52 – 54.
4. Голдовский Б.И. Система закономерностей построения и развития технических систем (1981-1983) – http://triz-summit.ru/ru/205253/203840/Gold/303251/
5. Голдовский Б.И. Проблемы моделирования развития технических систем //Областная научно-практическая конференция «Проблемы развития научно-технического творчества ИТР». Тезисы докладов – Горький: 1983
6. Голдовский Б.И. Ещё раз о месте ТРИЗ (2013) -http://www.metodolog.ru/node/1593
7. Vladimir Petrov. The Laws of System Evolution. Berlin: TriS Europe GmbH, 646 pages, published in Russian. INNOVATOR (06) 01/2013, ISSN 1866-4180. Петров В. Законы развития систем. Монография. Тель-Авив, 2013
8. Любомирский А., Литвин С. Законы развития технических систем - GEN3 Partners, 2003 - http://www.metodolog.ru/00767/00767.html
9. Салямон Л.С. О некоторых факторах, определяющих восприятие нового слова в науке // Научное открытие и его восприятие. – М.: Наука, 1971, с. 113
10. Шпаковский Н.А. Законы развития систем и линии их развития // Сборник докладов IX международной конференции «ТРИЗ. Практика применения и развитие методических инструментов». Москва 10-11 ноября 2017 года. Том 2. С. 177-190 -
http://trizofication.ru/conference2017
11. Голдовский Б.И. О противоречиях в технических системах-2 / Б.И.Голдовский. – Нижний Новгород, 1999. – Деп. в ЧОУНБ 28.02.2000 № 2547 – http://www.metodolog.ru/00001/00001.html
12. Голдовский Б.И. Некоторые размышления о сути ТРИЗ. (2017) - http://triz-summit.ru/205253/203840/gold/303614/
13. Голдовский Б.И., Вайнерман М.И. Рациональное творчество – М.: «Речной транспорт», 1990
14. Голдовский Б.И. О законе «Согласование технических систем» (2013) - http://www.metodolog.ru/node/1632
15. Голдовский Б.И. О специализации, универсализации и гибридизации / Сборник докладов VIII международной конференции «ТРИЗ: практика применения и проблемы развития». Москва 11-12 ноября 2016 года. С. 213-228
16. Голдовский Б.И. О динамичности и управляемости технических систем (2017) - http://www.metodolog.ru/node/2041; http://triz-summit.ru/205253/203840/Gold/303482/
17. Половинкин А.И. Основы инженерного творчества: Учеб, пособие для студ. вузов. - М: Машиностроение, 1988
18. Голдовский Б.И. Можно ли измерить идеальность? (заметки о центральной закономерности ТРИЗ) (2012) - http://www.metodolog.ru/node/1484
- Koller R. Konstruktionsmetode fur den Maschinen – Gerte – und apparatebau – Berlin: Springer – Verlag, 1976 - Пер. с нем.: Коллер Р. Метод конструирования машин, приборов и аппаратов: 1976 - http://www.metodolog.ru/00348/00348.html
20. Хотимлянский Ю. Энергетический анализ технических систем. – Баку, 1974
21. Комплексный метод поиска новых технических решений. В 3-х частях. – Горький: 1979, 1980 (Голдовский Б.И. и др.,в соавторстве)
22. Кристенсен К.М. Диллема инноватора. Как из-за новых технологий погибают сильные компании. Пер. с англ. – М.: Альпина Бизнес Букс, 2004
23. Чайковский Ю.В. Активный связанный мир. Опыт теории эволюции жизни. – М.: Товарищество научных изданий КМК, 2008
24. Кондраков И.М. Учимся познавать мир. Учебное пособие – С-Петербург: РНТО, 2015
25. Голдовский Б.И. Оригинальные самолеты Берта Рутана (2016) - http://triz-summit.ru/ru/205253/203840/Gold/302917/
г. Нижний Новгород
февраль 2018г.