|
ФСА мачтовой опоры осветительных приборов
А.C. Алтуфьев
Московский общественный институт технического творчества
2005/2006
ВВЕДЕНИЕ
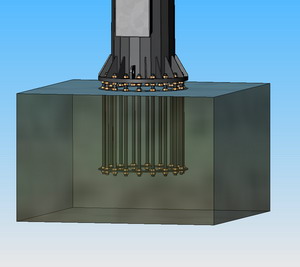
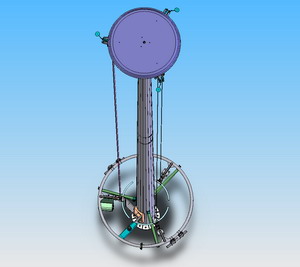
В последнее время всё большее распространение в системах освещения городов, автодорог, аэропортов и т.д. получают высокомачтовые опоры освещения с мобильной короной.

С точки зрения теории светотехники для большего комфорта людей осветительные приборы (ОП) наружного освещения (прожекторы) надо располагать как можно выше. Но на каком-то этапе возникает проблема их обслуживания. Налицо - техническое противоречие: ствол опоры должен быть высоким для комфортного освещения и должен быть низким для удобства обслуживания. Один из способов разрешения этого противоречия - сделать так, чтобы конструктивный узел, на котором держатся ОП (корона), опускался, т.е. необходимо придать короне мобильность. Существуют проекты конструкций опор освещения, построенных по этой схеме, многие из них уже эксплуатируются.
Была поставлена задача разработки новой конструкции опоры освещения. При этом наложены ограничения:
" повысить удобство эксплуатации;
" снизить стоимость опор;
" оставить без изменения основной принцип построения конструктивной схемы - удобство обслуживания ОП должно достигаться именно за счет опускаемой рамы короны;
" оставить без изменения (или с минимальными изменениями) ствол опоры - он должен выполняться из отдельных секций, каждая из которых - граненая конструкция высотой не более 12 метров, согнутая из листовой стали - многогранная правильная усеченная пирамида; верхние секции телескопически надеваются на нижние)
" конструкция должна быть пригодна для размещения серийно выпускаемых прожекторов на высоте 20…40 метров.
Решаем задачу при помощи функционально-стоимостного анализа.
ФУНКЦИОНАЛЬНО-СТОИМОСТНОЙ АНАЛИЗ.
Объект: ОВМГ (Опора высокомачтовая граненая с мобильной короной).
1. Предметный анализ
Для предметного анализа важно правильно определиться с необходимой и достаточной глубиной разделения объекта на составные части. Согласно конструкторской документации, ОВМГ состоит из следующих элементов:
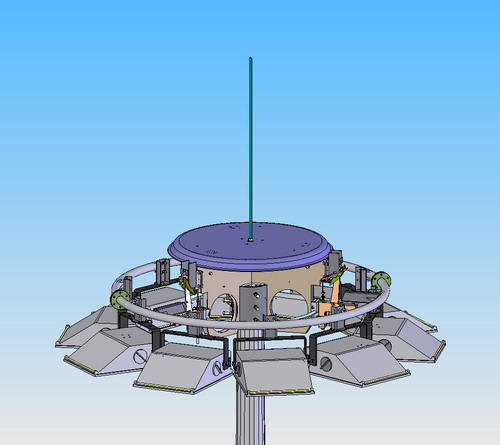

1.Ствол опоры
2.Блок корпуса короны
3.Рама короны
4.Молниеотвод
5.Редуктор-лебедки.
В список, составленный по спецификации, не вошли объекты, ради которых изготавливается опора освещения - ОП, а также элементы крепления ОП на раме короны (кронштейны крепления прожекторов). Кроме того, жизненный цикл нашего объекта невозможен без оператора, энергии, эксплуатационного комплекта (электродрель, кронштейн крепления электродрели, предохранительная муфта, ограничивающая момент на входном валу редуктора), кронштейнов рамы, на которые опирается рама при обслуживании ОП (крепятся на ствол).
Молниеотвод и ствол - достаточно целостные узлы, наличие и строение которых величина заданная и не имеет смысла рассматривать их с точки зрения ФСА всего изделия.
Исходя из вышесказанного, имеет смысл пересмотреть компоненты объекта анализа, назовем его "Система спуска-подъема (ССП) ОП". Важными для анализа компонентами ССП являются:
1.Оператор
2.Электродрель
3.Рукоятка
4.Редуктор-лебедка
5.Блок корпуса короны
6.Рама короны
7.Кронштейн крепления электродрели
8.Предохранительная муфта
9.Кронштейны рамы короны.
2. Функциональный анализ. Фрагмент ФА для компонентов "оператор" и "рама" приведен в Таблице 1.
Табл. 1. Функциональная модель "системы спуска-подъема ОП" (фрагмент).
1. Оператор
1.1. принимает решение о спуске ОП
1.2. надевает рукоятку на входной вал редуктора
1.3. крутит рукоятку
1.4. снимает рукоятку
1.5. устанавливает электродрель на редуктор
1.6. включает дрель
1.7. удерживает дрель от проворачивания (опускает раму)
1.8. выключает дрель
1.9. обслуживает ОП
1.10. снимает дрель с редуктора
… …
6. Рама
6.1. информирует оператора о достижении нижнего положения
6.2. держит кронштейны
6.3. держит шток (при спуске-подъеме обеспечивает штоку одну степень свободы относительно рамы)
6.4. держит пружину
… …
При детальном рассмотрении оказалось, что функциональная загруженность элементов "блок корпуса короны" и "рама короны" гораздо выше остальных. Поэтому, в процессе анализа эти элементы были представлены более подробно (здесь не приводятся).
3. Потоковый анализ
Рассмотрим эффективность работы кинематической схемы конструкции в системе спуска-подъема. Универсальный показатель эффективности кинематической схемы - коэффициент полезного действия (КПД). Для расчета КПД возьмем конкретную конструкцию - опора освещения высотой h=30 метров с общей перемещаемой массой m=500 кг. Для подъема в течение 15 минут требуется расчетная мощность 170 Вт. Мы же для этих целей используем электродрель мощностью N=2000 Вт. Таким образом, КПД системы спуска-подъема - 0,085.
При детальном рассмотрении системы было выявлено, что основной вклад в потери энергии вносят:
" потери на червячном редукторе (трение зубьев червяка и червячного колеса);
" потери при намотке троса на барабан редуктора;
" потери тросов (на 6-ти шкивах);
" потери при трении и перегибании кабелей (на 2…6-ти шкивах)
Например, КПД шкивов составляет не более 0,2, то есть огромная часть энергии уходит на перегибание тросов и кабелей, в основном кабелей, так как их жесткость гораздо выше жесткости тросов.
4. Стоимостный анализ На рисунке 4 приведен стоимостный вес отдельных элементов системы с учетом детализации элементов "блок корпуса короны" и "рама короны".
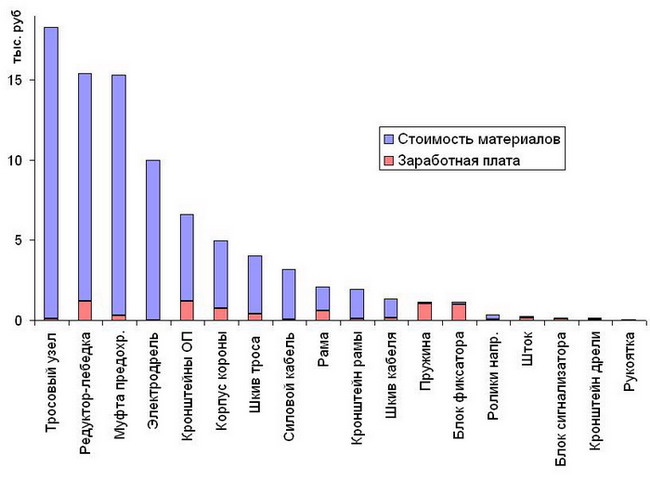
Рис. 4. Распределение затрат на элементы системы.
Анализ данного распределения позволяет сделать вывод о том, по каким элементам и статьям расходов надо активнее вести работу по снижению затрат.
5. Тримминг функций и элементов. Тримминг проводим по принятым правилам и в соответствии с ограничениями, наложенными при постановке исходной задачи.
Проведенный функциональный, потоковый и стоимостный анализ показал, что надо избавиться от тросов и кабелей, несущих в себе большую часть нежелательных эффектов. Таким образом, модель решения может выглядеть так: более дешевый обычный кабель закрепляется неподвижно на стволе опоры, а количество тросов уменьшается с трех до одного.
Таким способом решается ряд проблем, но возникают вторичные задачи:
1. Как передать электроэнергию осветительным приборам?
Формулируем техническое противоречие: если кабель гибкий, то есть электрическая проводимость от источника энергии к осветительным приборам, но КПД кинематики системы низкий и стоимость системы высока; если кабель жесткий, то снижается стоимость и повышается КПД системы, но теряется электрическая проводимость. Разрешение противоречия возможно во времени, в пространстве, в отношениях. Решаем противоречие во времени: во время подъема и спуска ОП энергия им не нужна. Соответственно, необходимо поставить электрический разъем в точке верхнего положения узла крепления ОП.
2. Как зафиксировать узел крепления в верхней точке?
Общую идею фиксации узла крепления ОП оставляем без изменения, то есть процесс движения проходит по тому же циклу, что и раньше, но фиксация происходит не на трех геометрически разнесенных точках, а на одной. При этом необходимо на каждом шаге движения продумать обеспечение необходимого и достаточного числа степеней свободы подвижной части конструкции.
3. Как обеспечить горизонтальность узла крепления осветительных приборов при его подъеме-спуске? (раньше это достигалось за счет наличия трех тросов крепления рамы).
Переформулируем задачу - надо обеспечить горизонтальность узла крепления осветительных приборов на этапе его подъема-спуска при условии крепления этого узла на одном тросе, монтажа всей конструкции "в условиях стройки", дестабилизирующего воздействия атмосферы (ветер, обледенение). Здесь возможно несимметричное размещение осветительных приборов относительно точки подвеса. Вторая задача, которая раньше вообще никак не решалась, заключается в обеспечении безопасности при несанкционированном опускании узла крепления ОП (при падении).
Из всего набора функций, выполняемых оператором, хотелось бы оставить принятие решения о необходимости спуска осветительных приборов, включение-выключение механизма подъема, обслуживание ОП. На первом этапе проводим свертывание всех функций оператора, кроме перечисленных. Предпочтение отдаем условию, при котором свертывание функции возможно тогда, когда нет объекта функции. Таким образом, мы освобождаемся и от объектов функций, то есть компонентов системы. В результате получаем преобразованную функциональную модель системы спуска-подъема.
После процедуры тримминга из-за перераспределения функций элементов целесообразно переопределить элементы по-новому:
" редуктор-лебедку с функциями, перешедшими к нему от электродрели, блока фиксатора, рукоятки, блока сигнализатора, тросового узла, назовем "узел привода"
" раму с перешедшими к ней функциями штока, кронштейнов осветительных приборов - "узел крепления ОП";
В результате, громоздкая функциональная модель исходной системы из 23 элементов, выполняющих 71 функцию (рисунок 5), после тримминга преобразуется в новую систему, состоящую из 7 элементов с 15 функциями (рисунок 6).
Рис. 5. Функциональная схема исходной мачтовой опоры.
Рис. 6. Функциональная схема системы после тримминга компонентов.
6. Выполнение функций элементами после тримминга
Следующая задача заключается в анализе возможности выполнения функций, которые легли на каждый элемент системы; если функция не выполняется в исходном варианте конструкции, то надо придумать новый способ ее выполнения (конструктивный, технологический, организационный и т.д.). В результате такого анализа был предложен ряд изменений для элементов "ствол", "узел привода ОП" и "узел крепления ОП".
1. Ствол.
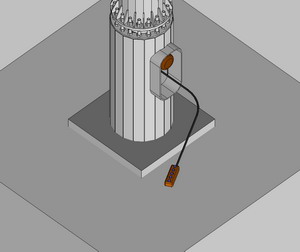
1.1. Функция "держать узел привода" может выполняться старым способом - в нижней части ствола приварить конструктивный элемент, подходящий по посадочным местам к узлу привода. Здесь возможна такая ситуация, что узел привода по габаритам просто не уместится в ствол опоры. Одно из решений - изменение конструкции фундаментного блока опоры (рисунок 7б). До сих пор фундаментный блок нами не рассматривался. Традиционно на опорах рассматриваемого типа фундаментный блок - это конструкция, состоящая из двух фланцев, соединенных между собой большим количеством (12…24 шт.) шпилек (длиной порядка 1,5 м) диаметром 20…40 мм, выполненных из высокопрочной (следовательно, дорогой) стали. Эта конструкция заливается бетоном. На верхнюю, выступающую над поверхностью земли часть шпилек крепится фланец ствола опоры. Вместо отдельных шпилек предлагается использовать сплошную обечайку диаметра большего, чем диаметр нижней части ствола. Нижняя часть обечайки заливается бетоном, верхняя выступает над землей на 1200…1500мм. В ней предлагается поместить технологический люк для установки узла привода. Таким образом, фундаментный блок по конструктивному исполнению является частью ствола.
а) Было

б) Стало
Рис. 7. Фундаментный блок опоры.
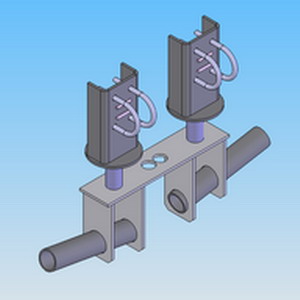
1.2. Для выполнения функции "держать узел крепления ОП" необходимо разработать узел фиксации узла крепления ОП, выполняющий функции блока фиксатора исходной конструкции опоры освещения.
В исходной конструкции (рисунок 8а) было три узла фиксации, и при движении трёх подвижных элементов вокруг трёх кулачков по довольно сложной траектории их перемещение на каждом шаге кулачка часто происходит несогласованно. Из-за этого два узла уже могут "зафиксироваться", а третий - нет. К тому времени, как третий узел войдёт в зацепление, два первых уже выдут из зацепления. В результате - вся рама короны с прожекторами повиснет на одной или двух точках.
а) Было
б) Стало
Рис. 8. Узел крепления ОП.
Другим фактором нестабильной работы системы является разная длина тросов как из-за неточности их изготовления и регулировки, так и вследствие разного вытягивания тросов в процессе эксплуатации Дополнительный нежелательный фактор - раскачивание рамы ветром.
В исходной конструкции каждый из трех штоков фиксатора должен подталкиваться к своему исходному положению двумя пружинами (рисунок 9). В результате общая погрешность работы фиксатора складывается из погрешностей по геометрии и по жесткости шести 6 пружин. Кроме того, зимой происходит обледенение витков пружин и их поломка. Ремонт всех этих неисправностей требует обязательного присутствия автовышки.
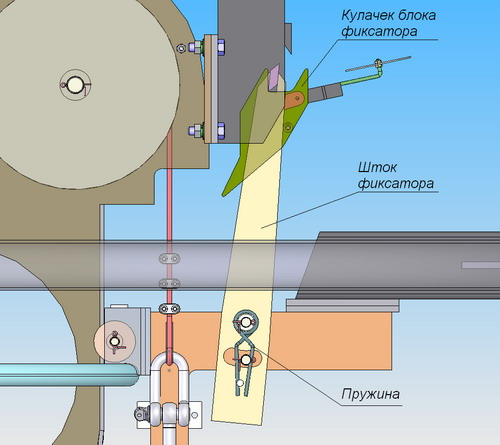
Рис. 9. Работа фиксатора в исходной системе.
При поднятии рамы в начале пути почти весь кабель находится снаружи относительно корпуса ствола опоры и давит на одну сторону рамы короны, в результате чего рама движется с перекосом. В конце пути, когда рама находится недалеко от верхней точки, кабель уже перешел через шкивы внутрь ствола, и тянет один край рамы короны вверх. Это дает раме дополнительный перекос и рассогласованность работы механизмов фиксации.
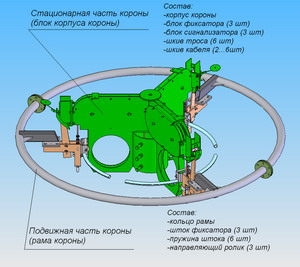
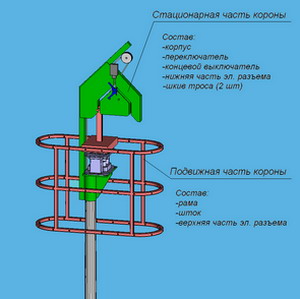
В предлагаемой конструкции предлагается заменить три троса, а один (рисунок 8б). В верхней части ствола опоры освещения находится некая конструкция. По аналогии с исходной опорой можно её назвать "Неподвижная часть короны", хотя здесь она выродилась в небольшую пристройку к стволу. В неё входят: корпус, 2 шкива троса, переключатель, концевой выключатель, нижняя часть электрического разъема силовой цепи питания прожекторов. Назначение переключателя состоит в том, что при движении из самой верхней точки штока он задает штоку поочередно возможность движения либо вниз и влево - в положение замыкания электрического разъема и установки рамы в рабочее положение, либо вниз и вправо - в положение "рама опущена для технического обслуживания". Через шкивы перекинут трос. Один его конец уходит к лебедке (проходит внутри ствола), на другом закреплен "узел крепления ОП" (подвижная часть короны). Ось троса не совпадает с осью ствола. Положение троса задает верхний шкив троса. Центр тяжести переключателя не совпадает с его осью вращения. Переключатель занимает крайнее правое положение. Его положение стабильно из-за действия на него силы тяжести. Подвижная часть короны состоит из рамы короны и штока (единая конструкция), и верхней части электрического разъема. Трос движется вверх, шток заходит в направляющий паз корпуса, идет по вертикальному пазу, переходит в наклонный паз.
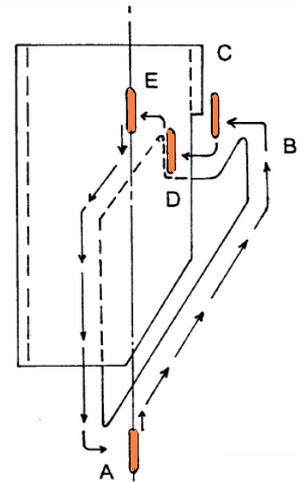
Детальный процесс работы фиксатора в предлагаемой конструкции проиллюстрирован на рисунке 10.
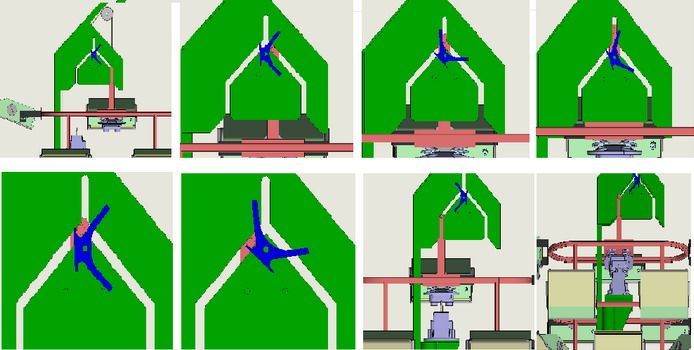
Рис. 10. Работа фиксатора в предлагаемой системе.
а) исходное положение фиксатора; б), в), г) шток движется по наклонному пазу, проходит переключатель, поднимается по центральному вертикальному пазу, давит на конечный выключатель. От конечного выключателя подается сигнал на переключение направления вращения лебедки. Шток опускается и переходит в левый наклонный паз; д), е), шток задевает малое плечо переключателя и переводит переключатель в крайнее левое положение; ж) шток заходит в левый вертикальный паз - верхняя и нижняя части разъема располагаются на одной оси; з) шток движется вниз, разъем замыкается, лебедка еще немного вращается для ослабления троса. Затем на двигатель лебедки перестает подаваться напряжение, срабатывает тормоз, система готова к рабочему включению прожекторов. Перевод системы в положение технического обслуживания происходит в обратном порядке.
Сравнение кинематических схем исходной и предлагаемой конструкций показано на рисунке 11. Следует учесть, что для исходной конструкции кинематика показана только для одного из трех блоков фиксации.
а) Было
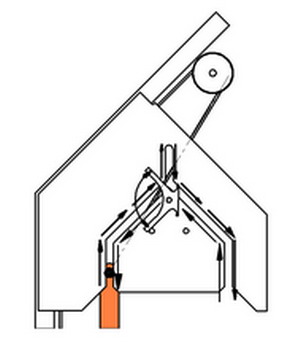
б) Стало
Рис. 11. Узел крепления ОП.
1.3. Обеспечить функцию "держать силовой кабель" несложно: неподвижный кабель закрепляется на неподвижной конструкции. Такой способ закрепления реализуется во многих системах.
1.4. Функция "Стабилизировать положение узла крепления ОП" в предлагаемой конструкции не выполняется: центр тяжести узла крепления ОП не совпадает с осью ствола. Поэтому, в состав узла крепления ОП предлагается ввести конструктивные элементы, не дающие ему вращаться вокруг вертикальной оси (рисунок 12б).
а) Было

б) Стало
Рис. 12. Стабилизация узла крепления ОП.
1.5. Для выполнения операции "держит-страхует узел крепления ОП во внештатной ситуации" узел крепления ОП в предлагаемой системе при обрыве троса и падении "заклинивает" на стволе.
2. Узел привода.
Для выполнения всего набора функций, которые легли на этот узел в результате свертывания элементов системы предлагается взять двухскоростную лебедку с нормально блокирующим тормозом. (Необходимо учитывать, что мы решаем конкретную производственную задачу; при этом большое значение имеет скорость внедрения и проще купить готовый серийно выпускаемый узел, чем самим тратить время на его разработку и освоение производства). Это обеспечит быстрое движение на всем пути, кроме зоны фиксации, а в зоне фиксации - медленное. Кроме того, для повышения КПД лебедка должна быть с планетарным, а не червячным редуктором и с выносным пультом управления для безопасности оператора (рисунок 13б). Отключаться она должна от концевых выключателей, срабатывающих на положение узла крепления ОП.

а) Было
б) Стало
Рис. 13. Узел привода.
3. Узел крепления ОП:
3.1. Функция "держит ОП" раньше выполнялась кронштейнами ОП (рисунок 14а). Типоразмеров кронштейнов ОП было много: под каждый тип прожектора. Предлагается в силовом конструктивном элементе узла крепления ОП, изготовленном из листа, уголка, прямоугольной трубы и т.д., выполнить либо группы отверстий, чтобы создать универсальный узел для разных способов крепления ОП и разного их количества, либо под каждую конкретную опору разбивку отверстий проводить индивидуально (рисунок 14б). Поскольку в конкретном заказе вариантов исполнения опор не так уж и много, то этот вариант более реальный. В этом случае раму удобнее делать не из прямоугольных труб, т.к. их легче сверлить.
а) Было
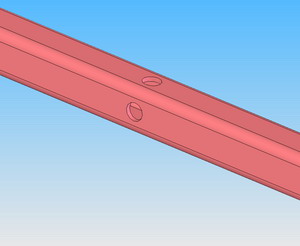
б) Стало
Рис. 14. Кронштейн крепления ОП.
7. Заключение.
В исходной системе мы имели три троса. Этим обеспечивалась угловая устойчивость рамы короны при её подъеме. В предлагаемой конструкции оставлен один трос при сохранении требуемой устойчивости.
По предварительным расчетам изменения по стоимости в предлагаемой конструкции по сравнению со исходной будут выглядеть так:
| - |
Исходная конструкция |
Предлагаемая конструкция |
| Материалы |
79.005 |
25.300 |
| Трудоемкость |
7365 |
2550 |
| Итого |
86370 |
27850 |
Поставленная перед ФСА задача - снизить стоимость короны решена: стоимость снижена почти в три раза. Другая задача - повысить удобство эксплуатации также решена: из десяти функций, лежащих на операторе первоначально, осталось три, причем отброшены самые трудоёмкие. Попутно решен вопрос безопасности оператора: он находится на значительном расстоянии от опоры и управляет движением "с пульта". Снята и угроза травм при обрыве троса: при падении раму "заклинит" на стволе.
|