ЗАЧЕМ ПОДВОДНОЙ ЛОДКЕ КРЫЛЬЯ
Б.И.Голдовский
Нижний Новгород, февраль 2013 года
1. В книге С.Переслегина «Новые карты будущего, или Анти-Рэнд», вышедшей в свет в 2009 году, среди технологических прогнозов на 2015-2025 годы значатся «суда и подводные лодки с динамическим поддержанием» ([1], с. 283). Состояние и некоторые перспективы дальнейшего использования судов с динамическими принципами поддержания были рассмотрены в работе [2]. Что касается подводных лодок, то появившиеся в последнее время публикации под заголовками, к примеру, «Подводный полет» и «В бездну на крыльях» [3], [4], [5] подталкивают поискать ответ на вопрос «Зачем подводной лодке крылья?».
В указанных публикациях описаны проекты Грэма Хокса, который является конструктором достаточно известной техники для выполнения подводно-технических работ и давним поборником применения крыльев на подводных лодках. К настоящему времени он создал несколько опытных образцов «крылатых» подводных аппаратов и вышел на рынок с двумя коммерческими проектами подводных аппаратов «сухого» (рис. 1) и «мокрого» (рис. 2) типа. Основными достоинствами предлагаемых Г.Хоксом аппаратов по его словам являются:
- наличие постоянной положительной избыточной плавучести (избытка силы плавучести над силой веса, порядка 50-100 кг), которая компенсируется не движителями или балластом, а заглубляющей гидродинамической силой, создаваемой крыльями на ходу; при потере хода аппарат просто всплывет на поверхность, что обеспечивает безопасность эксплуатации;
- высокая маневренность аппарата, позволяющая выполнять под водой фигуры, напоминающие высший пилотаж самолета (можно отметить, что концепцией скоростной и маневренной крылатой боевой подводной лодки Г.Хокс занимался ещё в 70-е годы прошлого века).

Рисунок 1. Подводный аппарат «сухого» типа Deep Flight Super Falcon

Рисунок 2. Подводный аппарат «мокрого» типа Necker Nymph
Необходимо отметить, что наличие постоянной избыточной положительной плавучести такого же порядка для обеспечения безопасности предусмотрено практически на всех обитаемых подводных аппаратах. Компенсация этой силы производится или движителями (независимо от наличия продольного движения), что также относится к динамическому принципу, или гидродинамическими силами, возникающими на ходу на корпусе и выступающих частях (горизонтальных рулях и стабилизаторах). При этом в зависимости от архитектуры аппарата в ряде случаев применяются и несимметричные («крыловые») профили рулей и/или стабилизаторов. В любом из указанных случаев компенсации избыточной плавучести обеспечивается всплытие аппарата на поверхность при потере хода. В чистом виде «затаскивание» аппарата под воду за счет гидродинамических сил издавна применяется, например, в судомоделизме (для моделей подводных лодок) или для буксируемых подводных аппаратов, у которых нет режима «зависания без хода». Примером такого «крылатого» обитаемого подводного аппарата является буксируемый аппарат «Тетис» проекта 1605, разработанный в г. Горьком и построенный в г. Ленинграде в начале 70-х годов (рис. 3) [6].

Рисунок 3. Обитаемый буксируемый подводный аппарат «Тетис» проекта 1605
Необходимость «затаскивания» самоходного аппарата под воду за счет гидродинамических сил приводит к появлению некоторой скорости хода, менее которой аппарат не может удерживаться под водой. У аппаратов Г.Хокса величина такой минимальной скорости составляет 2 узла (1 м/с). В то же время известно, что, например, для визуального обследования морского дна наиболее предпочтительна скорость движения не более 1 узла (0,5 м/с). Таким образом, первая особенность предлагаемых «крылатых» подводных аппаратов не является новой, а её техническая реализация не является оптимальной.
Нет также однозначной связи между наличием крыльев и высокой маневренностью подводного аппарата или подводной лодки. Следует отметить, что современные боевые подводные лодки могли бы за счет своей скорости и рулей выделывать под водой разные пируэты, создавая большие наклоны по крену и дифференту. Однако из условий безопасности работы экипажа, который в подводной лодке располагается совсем не по самолетному, эти наклоны специально ограничиваются (например, за счет снижения скорости перекладки рулей на больших скоростях или применения специальных уменьшенных кормовых горизонтальных рулей). В начале 70-х годов прошлого века в СССР была уже реализована концепция подводной лодки «истребителя» с высокой скоростью и маневренностью: проект 705 [7]. Эта подводная лодка (без крыльев) за счет высокой энерговооруженности (в 2 и более раз превышающей энерговооруженность современных подводных лодок) могла разогнаться до полного хода за 60 с и изменить курс на 180 градусов всего за 42 с. Могла даже уходить от торпед. Однако шумность ее была слишком велика. Поэтому современные малошумные подводные лодки обороняются от торпед не столько маневром, сколько специальными средствами самообороны (как это красиво показывается в некоторых Голливудских фильмах).
Такую фигуру высшего пилотажа как «бочка» мог, например, выполнить и буксируемый аппарат «Тетис», но не за счет наличия крыльев, а за счет большого момента, создаваемого кормовым вертикальным рулем относительно точки крепления буксирного кабель-троса. Возможность выполнения маневров, близких к фигурам высшего пилотажа, аппаратами Г.Хокса обусловлена минимальной величиной остойчивости (по нижнему пределу, определяемому Классификационными обществами) и сравнительно высокой для подводных аппаратов скоростью хода (5-10 узлов). Последняя обеспечена успехами в разработке электродвигателей и аккумуляторных батарей для электроприводных автомобилей, интенсивно развивающихся в настоящее время. Что касается обычного маневрирования в вертикальной плоскости, то компьютерное моделирование для аппарата типа Deep Flight Super Falcon (с использованием спецификационных данных [8]) показало, что замена крыльев носовыми рулями таким образом, чтобы две пары горизонтальных рулей несимметричного профиля имели общую площадь даже меньше, чем суммарная площадь горизонтальных рулей и крыльев (на 25%), увеличивает, например, скорость переходов по глубине. В частности, средняя скорость увеличивается примерно в 1,5 раза. Полученная разница является существенной при использовании «крылатых» аппаратов для погружения на большие глубины: ведь Г.Хаукс создал подобный аппарат для покорения Марианской впадины [5], [9] (рис. 4). Компьютерное моделирование для этого аппарата показало, что заявленная продолжительность перехода на 11 км по глубине и обратно за 5 часов не может быть реализована при наличии постоянной положительной плавучести аппарата (что подчеркивается в рекламных публикациях). Такая продолжительность может быть достигнута только при погружении с отрицательной избыточной плавучестью (с превышением силы веса над силой плавучести) с последующим сбросом твердого балласта, что применяется на целом ряде глубоководных аппаратов. Планировавшееся погружение аппарата Deep Flight Challenger (Virgin Oceanic) на предельную глубину мирового океана не произошло, что может быть и к лучшему, поскольку принятые технические решения (прочный титановый корпус цилиндрической формы, сопряженный с прочной полусферой диаметром 0,5м из кварцевого стекла) являются слишком рискованными для давления в 1100 атмосфер даже при современном уровне техники.

Рисунок 4. Подводный аппарат Deep Flight Challenger (Virgin Oceanic)
Одиночное погружение в Марианскую впадину совершил, как известно, Джеймс Кэмерон на специально созданном в Австралии для этой цели батискафе Deepsea Challenger [10] (рис. 5).
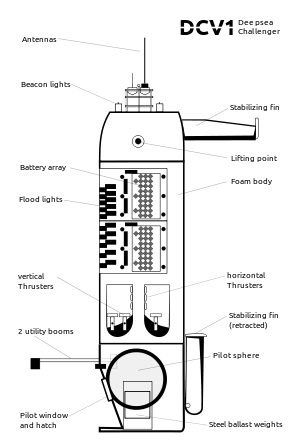
Рисунок 5. Схема глубоководного батискафа Deepsea Challenger
Сравнение аппарата Deep Flight Challenger (Virgin Oceanic) с батискафом Deepsea Challenger наглядно показывает, в чем, собственно говоря, заключается подход Г.Хокса в создании крылатых подводных аппаратов. Созданный австралийцами батискаф может с помощью движителей перемещаться по вертикали со скоростью до 2,5 узлов и по горизонтали со скоростью до 3 узлов, имеет сбрасываемый аварийно-маневровый груз весом 500 кг, может зависать на месте, брать образцы с грунта, обеспечивает длительное пребывание на предельной глубине, т.е. представляет собой специализированное техническое средство для проведения исследований на сверхбольших глубинах. Реальное погружение Д. Кэмерона продолжалось 2 часа 37 минут (под движителями), нахождение на глубине 3 часа и всплытие 1 час 10 мин (за счет сброса груза). При этом батискаф подтвердил свои технические характеристики, включая безопасность, и может быть использован для других исследовательских погружений. А аппарат Г. Хокса должен был только погрузиться на предельную глубину, продержаться на ней, двигаясь со скоростью не менее 2 узлов, не более 1 часа и вернуться на поверхность. Никаких исследований с его помощью (кроме видеосъемки в движении) провести было нельзя. Он предназначался исключительно для установления рекорда одиночного погружения миллионером-экстремалом Стивом Фоссеттом. То есть этот и другие аппараты Г. Хокса предназначены не для работы, а для спорта и развлечений. И решения о применении крыльев, а также водометного движителя (засасывающего воду через вырезы в обшивке корпуса аппарата), приводящие к определенному ухудшению технических параметров, являются не техническими, а дизайнерскими, имитирующими самолетную архитектуру на подводном аппарате и имеющими целью «произвести впечатление».
Вообще все искусственные объекты, создаваемые человеком, можно приближенно разделить на две большие группы, руководствуясь лозунгом древнеримского плебса: «Хлеба и зрелищ!». Объекты, ориентированные на потребность в «хлебе», то есть на жизнеобеспечение человека, предназначены главным образом для выполнения некоторой работы. Соответствующие технические средства направлены на выполнение некоторой технической функции и в своем развитии оптимизируют применяемые принципы действия и параметры функционирования. Объекты, обеспечивающие «зрелища» для человека (чья потребность в «хлебе» в основном удовлетворена), развиваются по совершенно другим критериям. Для них главное – произвести впечатление. В соответствующих технических средствах возможно сочетание самых разнообразных принципов действия. К примеру, можно объединить снегоход с парапланом. А в области водных развлечений, например, применить крылья для затаскивания скоростного катера, имеющего вид дельфина, под воду на короткое время (до 20 с) [11] (рис. 6). Естественно, что модели развития технических систем, относящихся к столь разным сферам человеческих потребностей, будут весьма различны.

Рисунок 6. Двухместный скоростной ныряющий катер Innespace SeaBreacher
2. 2. Если для прогулочных подводных аппаратов применение крыльев не является строго обязательным, то среди подводной техники есть объекты, которые не могут обойтись без применения динамического принципа поддержания в воде. В первую очередь это относится к самым быстроходным подводным объектам – реактивным суперкавитирующим торпедам типа «Шквал» [12] или «Барракуда» [13] (рис. 7), имеющим скорость около 200 узлов. Поскольку основная часть корпуса находится в кавитационной каверне и Архимедова сила на ней не образуется, для компенсации силы веса такого объекта используются гидродинамические силы, возникающие на частях, взаимодействующих с водой: на носовой шайбе (которая используется для создания каверны), на кормовом оперении или небольших выдвижных крыльях. При большой скорости движения этого достаточно. Хотя необходимость в более существенных гидродинамических поверхностях может появиться при значительном увеличении размеров суперкавитирующего подводного объекта. Применение такой технологии для движения подводных лодок вряд ли можно ожидать в виду неэкономичности движения. Однако она может быть использована в спортивных целях: каким-либо миллионером-экстремалом для установления рекорда скорости перемещения человека под водой.
Рисунок 7. Суперкавитирующая торпеда «Барракуда»
3. Другой областью подводной техники, использующей динамический принцип поддержания в виде крыльев, являются исследовательские подводные планирующие аппараты (Sea Gliders), не имеющие движителей [14], [15] (рис. 8, 9 и 10). Все эти небольшие (весом до 100кг) подводные аппараты выполняют длительное сканирование водной среды на глубинах до 250…2700м, используя планирование под действием избыточной плавучести, изменение которой производится, чаще всего, за счет изменения количества гидравлической жидкости (масла) в гибкой емкости, обеспечиваемого работой насоса. Продолжительность работы насоса в общем цикле движения составляет около 2-3%, остальное время никакие механизмы на аппарате не работают. Скорость движения большинства подводных планеров близка к 0,5 узла (0,25 м/с). Поскольку планирование совершается и вверх и вниз, крылья аппарата имеют симметричный профиль.
Одним из первых подобных аппаратов был Slocum, разработанный в Океанографическо

Рисунок 8. Подводный планер Spray
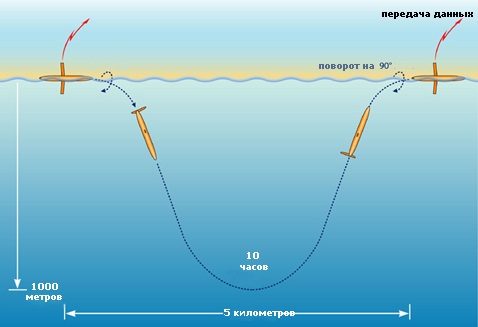
Рисунок 9. Профиль движения аппарата Spray (от одного сеанса связи до другого)
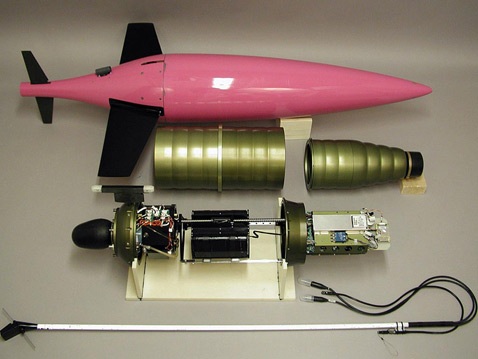
Рисунок 10. Внешний вид и составные части подводного планера Seaglider
Анализ движения аппарата Seaglider на основе данных, приведенных в [16] и [17], показал, что примененный принцип движения является энергетически более экономичным (в 1,2-1,4 раза) по сравнению с использованием движителей, обеспечивающих такую же скорость движения. При этом потребная максимальная мощность насоса, перекачивающего гидравлическую жидкость, может почти в 100 раз превышать потребную мощность гребного электродвигателя (поскольку мощность насоса определяется не только производительностью, но и максимальным давлением водной среды). Считается, что на данный экономичный принцип обеспечения движения подводных объектов первым обратил внимание океанограф Генри Стоммел (Henry Stommel) в 1989 году. Однако в СССР примерно 15 годами раньше прорабатывалась возможность подобного движения для подводных лодок, в надежде обеспечить особо малошумное перемещение при неработающей главной энергетической установке. Эти надежды не оправдались, поскольку мощность имеющегося на подводных лодках насосного оборудования не позволяла получить приемлемые скорости движения. Выполненный анализ также показал, что с ростом размеров подводного объекта и скорости его перемещения данный принцип движения (за счет планирования) теряет свои энергетические (а ещё раньше - экономические) преимущества из-за того, что при таком росте отношение коэффициента гидродинамического сопротивления для обычного продольного движения к коэффициенту сопротивления в режиме планирования заметно уменьшается. Особенно быстро это проявляется, если стоит задача перемещения по горизонтали, а не сканирования водной среды по глубине. Поэтому применение планирующего режима движения на больших подводных лодках ожидать не стоит. Однако данный принцип движения вполне может быть применен в спорте. Изменяя избыточную плавучесть подводного планера за счет поочередного заполнения водой некоторого прочного объема и продувания его сжатым воздухом, можно устраивать соревнования по достижению максимальной дальности подводного планирования с фиксированным количеством сжатого воздуха на борту.
4. Таким образом, прогноз о применении в ближайшее десятилетие динамических принципов поддержания на военных или гражданских подводных лодках вряд ли будет реализован. Для выполнения работ крылья могут быть использованы на буксируемых подводных аппаратах, а также на привязных аппаратах, выполняющих подводно-технические и спасательные работы в районах с большой скоростью течения [18]. Небольшие необитаемые подводные крылатые планирующие аппараты типа Seaglider будут использоваться не только для научных исследований, но и для поддержки боевых операций [19]. И, разумеется, применение динамических принципов поддержания в виде крыльев может найти применение на подводных объектах спортивного и развлекательного назначения.
Источники
1. Переслегин С.Б. Новые карты будущего, или Анти-Рэнд. – М.: АСТ; СПб.: Terra Fantastica, 2009
2. Голдовский Б.И. Почему до сих пор не осуществился прогноз Р.Л.Бартини, http://www.metodolog.ru/node/1578
3. Шрауп М. Подводный полет. // Популярная механика. 2010. № 1. С. 68-71
4. Санников В. В бездну на крыльях. // Популярная механика. 2012. № 10. С. 66-74
5. Подводная лодка VIRGIN OCEANIC - подводный транспорт будущего, http://venture-biz.ru/tekhnologii-innovatsii/268-virgin-oceanic
6. Буксируемый ОПА Тетис, http://oosif.ru/buksiruemyy-pa-tetis
7. Проект 705 «Лира». // Популярная механика. 2011. № 2. С. 58
8. Deep Flight Super Falcon, http://www.deepflight.com/subs/df_superfalcon.htm
9. Deep Flight Challenger, http://deepflight.com/subs/df_challenger.htm
10. Скоренко Т. Бездна Кэмерона. // Популярная механика. 2012. № 7. С. 58-61
11. Попов Л. Катера-дельфины выходят на старт подводных скачек. 05.12.2006, http://www.membrana.ru/particle/3153
12. Мамонтов Д. Хлыст Посейдона: суперторпеда. // Популярная механика. 2003. № 5, http://www.popmech.ru/article/5010-hlyist-poseydona/
13. Суперкавитационная торпеда «Барракуда»,
http://world-weapons.ru/torpedy/superkavitacionnaya-torpeda-barrakuda.html
14. Плавающий робот Spray впервые в истории пересёк Гольфстрим. 2004, http://www.sciencer.ru/robots/581166/
15. Таран А. Робот-планер проплавал рекордные девять месяцев. 18.09.2009, http://www.membrana.ru/particle/3341
16. Seaglider – Specifications, http://www.apl.washington.edu/projects/seaglider/specifications.html
17. Charles C. Eriksen and others. Seaglider: A Long-Range Autonomous Underwater
Vehicle for Oceanographic Research. // IEEE Journal of Oceanic Engineering. Vol. 26, No. 4, October 2001
18. Голдовский Б.И. Стыковка в глубине. Особенности проектирования спасательных подводных аппаратов. / ОАО «ЦКБ «Лазурит» - Нижний Новгород: 2012
19. Николаев М. Дело за малым. // Популярная механика. 2010. № 3. С. 82-86