В этой новой рубрике "История успеха" мы предоставляем слово тем, кто добился наиболее впечатляющих результатов в практическом применении ТРИЗ. Обычно горизонт таких работ не превышает нескольких лет. Но в этот раз первым представляем Бориса Голдовского с его многолетней работой. Это имя хорошо известно разработчикам ТРИЗ. Менее известно, что придя после окончания института на судостоительное предприятие, Борис ушел с него на пенсию более чем через сорок лет Генеральным конструктором подводных аппаратов специального назначения.

В 2012 году в Нижнем Новгороде издана книга Б.И.Голдовского «Стыковка в глубине. Особенности проектирования спасательных подводных аппаратов». Книга рассчитана на специалистов соответствующего профиля и обобщает многолетние оригинальные разработки автора. Главная особенность приведенного в книге материала заключается в изложении методики оценки эффективности систем спасания подводников по критерию «вероятность спасания» и в анализе необходимых требований к параметрам спасательных подводных аппаратов, исходя из обеспечения требуемого уровня критерия функционального эффекта.
В первой части книги изложена история развития систем спасания подводников и описано их современное состояние. Полагаем, что данный материал может быть полезен для специалистов ТРИЗ. Помните, читая, что он построен на живом опыте наших коллег.
История и современное состояние систем спасания подводников
Борис Голдовский Нижний Новгород
1 Система спасания подводников с затонувших подводных лодок возникла практически одновременно с появлением подводного флота и совершенствовалась вместе с развитием подводных лодок. Отдельные страницы истории развития спасательных средств уже освещались в печати (например, в [17], [19], [21], [23], [27], [30]). Однако в этих публикациях не показана логика развития, подчиняющаяся, в свою очередь, общим законам развития технических систем [4], [16] – именно они обеспечивают эффективность процесса, повышая вероятность спасения людей. Процесс изменения технических средств и технологий спасания подводников можно представить как конкуренцию различных принципов действия, в той или иной степени разрешающих противоречия, возникающие при использовании любого из методов спасания.
Первоначально выход людей с затонувшей подводной лодки осуществлялся так называемым «мокрым» способом - путем свободного всплытия группой вместе с воздушным пузырем. Шансы на спасение при таком способе различны для тех, кто оказывался в группе спасающихся первым и последним. В группе свыше 5…7 человек шансы последних на спасение становятся весьма небольшими. После появления в конце 20-х годов ХХ века индивидуальных дыхательных (кислородных) аппаратов (Чарльза Б. Момсена) спасание «мокрым» способом стало осуществляться путем шлюзования небольшими группами по 2…4 человека через специально оборудованный торпедный аппарат или через прочную рубку, либо по одному человеку через специальный спасательный люк (с затоплением отсека).
Выход «мокрым» способом методом шлюзования сопровождается сравнительно длительным нахождением человека под повышенным давлением, в результате чего его кровь успевает насытиться большим количеством азота. Во избежание кессонной болезни подъем на поверхность должен осуществляться по специальному буйрепу с остановками для декомпрессии. Такой режим выхода предъявляет особые требования к психологической подготовке подводника: не всякий человек способен подавить в себе инстинктивное стремление всплыть на поверхность без остановки. На практике часть спасающихся подводников так и поступала, что приводило к проявлениям кессонной болезни разной степени тяжести (вплоть до летального исхода).
Противоречие между необходимостью выполнения режима безопасного всплытия и инстинктом человека могло быть разрешено путем усиленных тренировок, либо снято путем изменения режима выхода человека из подводной лодки. Так появился новый режим индивидуального спасания «мокрым» способом – режим свободного всплытия. Осуществился возврат к всплытию вместе с пузырем воздуха, но на качественно новой основе. При свободном всплытии повышение давления до забортного производится так быстро, что кровь человека не успевает насытиться азотом, после чего спасаемый начинает быстро всплывать, выдыхая воздух из легких. Для осуществления такого режима были разработаны специальные спасательный люк и спасательное снаряжение, обеспечивающие спасение с достаточно больших глубин. Теоретически – с 250м. Для отработки режима свободного всплытия в СССР в 1960 году по проектам ЦКБ «Лазурит» была переоборудована подводная лодка проекта 613С, а также создан специальный погружающийся стенд «СВ».
Режим свободного всплытия в настоящее время является основным режимом спасания «мокрым» способом в зарубежных ВМС. Реальная глубина, с которой он осуществляется, например, в США, составляет около 450 футов (около 137м). Избыточное давление в отсеке подводной лодки, где расположен спасательный люк, должно быть не более 0,07 МПа (0,7 ати).
Современная техника рекомпрессии и последующей декомпрессии позволяет снизить негативные последствия кессонной болезни, если после нахождения под избыточным давлением до 0,4 МПа (4 ати) не более, чем через 20 минут после начала всплытия (быстрого снижения давления) человек будет помещен в декомпрессионную камеру для проведения лечебного цикла. При наличии над затонувшей подводной лодкой спасательных сил, оснащенных декомпрессионным комплексом, и при благоприятной погоде, позволяющей в допустимое время найти всплывшего подводника и переместить его в барокамеру, возможно спасение «мокрым» способом с глубин до 40м в режиме всплытия по буйрепу с нарушением времени выдержки. Следует также отметить, что обе последние успешно закончившиеся операции по спасанию российских подводников (на Тихоокеанском флоте в 1981 и в 1983 годах) осуществлялись выходом спасаемых через торпедный аппарат по буйрепу.
Главные недостатки спасания «мокрым» способом - неизбежный контакт человека с враждебной водной средой и наличие плохо контролируемого режима понижения давления окружающей среды - практически сразу с появлением подводного флота поставили задачу спасания подводников «сухим» способом. Решение задачи потребовало создания специальной спасательной системы, внешней по отношению к подводному кораблю. Первый этап создания и развития системы пришелся на первые десятилетия ХХ века.
Водоизмещение большинства создаваемых в начале прошлого века подводных лодок редко превышало 500…600 т, то есть они соответствовали современному классу малых подводных лодок. Район плавания подводных лодок ограничивался прибрежной зоной, поэтому аварии происходили, как правило, на малой глубине. В этих условиях самым простым способом спасения подводников представлялся подъем аварийной подводной лодки на поверхность вместе с экипажем с помощью специального спасательного судна. Эта идея впервые была реализована в Германии в 1907 году. Затем подобные спасательные суда были созданы и в других странах. В российском Военно-морском флоте первое спасательное судно, предназначенное для подъема аварийных подводных лодок, было построено в 1915 году. Оно получило название «Волхов», в 1922 году переименовано в «Коммуну» и сохранилось до наших дней [21].
По мере совершенствования подводных лодок, роста их водоизмещения и расширения района плавания оперативный подъем затонувшей лодки вместе с экипажем осуществлять уже не удавалось. Требовались новые подходы к проблеме спасения подводников. Первые практические шаги в разрешении возникшего противоречия были сделаны с созданием спасательного колокола в 30-е годы ХХ века. Принцип действия этого спасательного средства, называвшегося в момент создания «спасательная камера Маккена», заключается в присоединении к аварийному люку подводной лодки герметичной ёмкости, в которую переходили подводники. На корпусе подводной лодки ёмкость удерживалась за счет силы гидростатического присоса. Успешное применение этой спасательной камеры в 1933 году для спасения с глубины 80м 33-х членов экипажа подводной лодки США «Сквалус» ознаменовало наступление второго этапа в развитии систем спасания подводников. Спасательные суда стали вооружать спасательными колоколами (СК), которые содержали все необходимые элементы, обусловленные применяемым принципом гидростатического присоса (рис. 1):
- отсек для размещения спасаемых и операторов;
- камеру присоса со стыковочным фланцем, имеющим уплотняющий элемент, герметизирующий стык;
- балластные цистерны для осуществления присоса и замещения массы спасаемых.
В камере присоса СК устанавливалась также лебёдка для подтягивания к комингс-площадке ПЛ. Трос лебедки подтягивания соединялся с тросом-проводником, который прицеплялся за соответствующую деталь крышки спасательного люка ПЛ (рым или штырь) с помощью водолазов. Таким образом, стыковка спасательного колокола с комингс-площадкой аварийной ПЛ производилась путем перемещения в «направляющей упряжке», состоящей из подъемного и подтягивающего тросов.
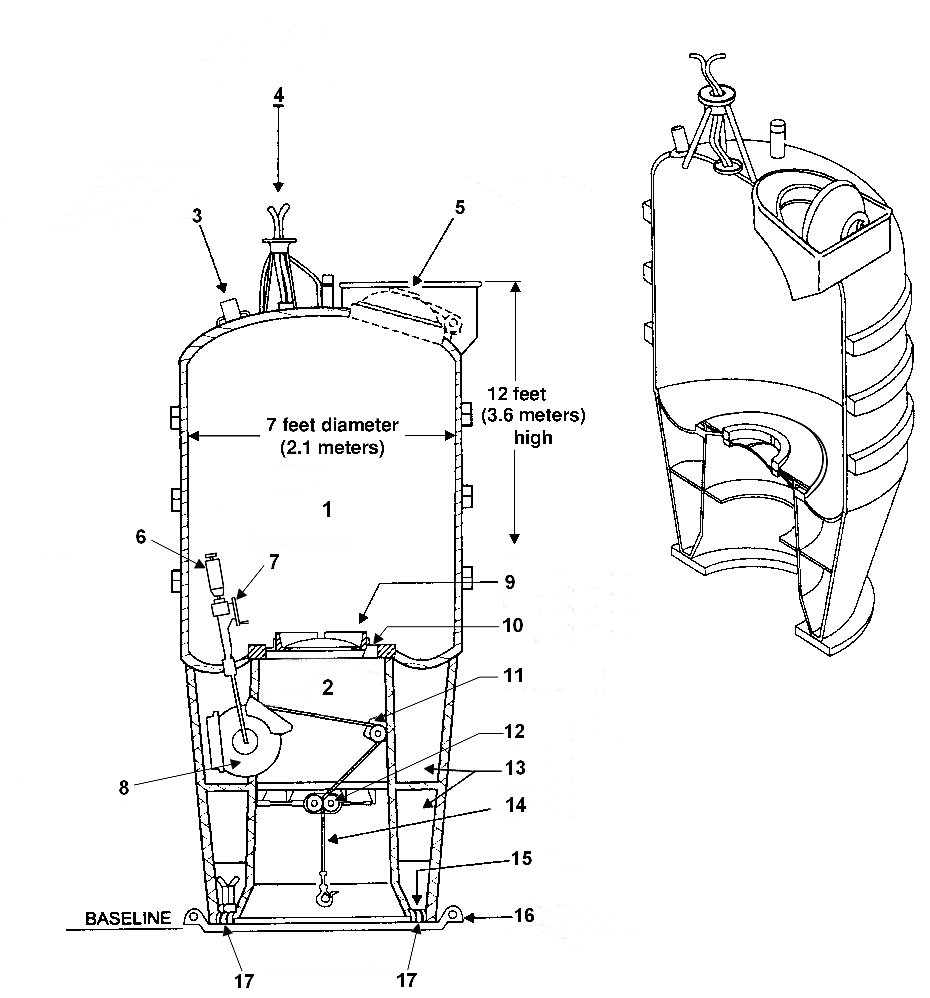
Рисунок 1. Схема спасательного колокола (США)
1 – спасательный отсек; 2 – камера присоса; 3 – акустический сигнализатор; 4 – кабель-шланговая связка; 5 – верхний входной люк; 6 – пневмопривод лебёдки; 7 – ручной привод лебёдки; 8 – лебёдка подтягивания; 9 – люк камеры присоса; 10 – иллюминатор; 11 – резак троса; 12 – направляющие троса; 13 – цистерны уравнительного балласта; 14 – трос подтягивания (с карабином); 15 – уплотняющий элемент; 16 – защитное кольцо (устанавливается на судне-носителе); 17 – посадочная поверхность
В Советском Союзе первый отечественный колокол СК-57 появился в 1956 году, после изучения зарубежного спасательного колокола, полученного по лэнд-лизу. В последующие годы создано еще несколько образцов спасательных колоколов: СК-59, СК-527 и СК-64. Причем последний колокол был в максимальной степени автономным. На нем были установлены аккумуляторная батарея, баллоны со сжатым воздухом и звукоподводная водолазная связь, а со спасательным судном его связывал только капроновый канат. Глубина погружения СК-64 составляла 500 метров. Водолазы на этой глубине работать не могли, поэтому для присоединения троса-проводника к спасательному люку аварийной подводной лодки и для выноса его на поверхность была создана привязная рабочая камера РК-680, разработанная ЦКБ «Лазурит». Камера имела манипуляторы, движители и была своеобразным предшественником жестких самоходных скафандров и коммерческих рабочих камер, появившихся за рубежом через 15…20 лет. Например, таких как ADS «Mantis», используемой в настоящее время со шведского спасательного судна «Belos». Однако на смену спасательным колоколам уже создавалась принципиально новая спасательная техника, ознаменовавшая переход к третьему этапу развития систем спасания подводников.
Известно, что применение спасательного колокола требует точной установки спасательного судна над затонувшей подводной лодкой. Для этого предварительно устанавливалось рейдовое оборудование в виде бочек, к которым и крепились швартовные тросы спасательного судна. Удержание на бочках и осуществление спуска и подъема спасательного колокола при натянутом тросе-проводнике было возможно лишь при невысокой степени волнения моря. Подготовительные операции и непогода приводили к большим потерям времени. Например, при ограничении волнения моря 3 баллами средние потери по погоде в морях, омывающих территорию России, составляют около 70% от общего времени работы в районе проведения спасательной операции. А всякое удлинение спасательной операции уменьшает вероятность выживания людей в отсеке аварийной подводной лодки и, соответственно, вероятность их успешного спасения.
Проблема была решена путем перехода к автономным спасательным аппаратам. Тенденция к повышению автономности спасательных колоколов, проявившаяся в переходе от СК-57 к СК-64, получила свое логическое завершение: постоянная физическая связь спасательного средства с судном-носителем была разорвана. Это не только позволило уменьшить потери времени, характерные при использовании спасательного колокола, но и значительно расширило возможные области проведения спасательной операции, включив подлёдные Арктические районы. Следует отметить, что в этом Россия имеет несомненный приоритет. Если первый отечественный спасательный колокол был создан гораздо позже зарубежных и по времени совпал с появлением первого в мире подводного аппарата «Дениза» Ж.И.Кусто, то первый в мире автономный спасательный подводный аппарат - управляемый подводный снаряд (УПС) – появился в России.
При разработке технических заданий на эту принципиально новую технику российские спасатели подошли к решению проблемы потери времени наиболее кардинально. Кроме создания автономного спасательного аппарата было предусмотрен проект специальной подводной лодки, на которой должен базироваться этот аппарат.
Разработанные ЦКБ «Лазурит» по заданиям ВМФ управляемый подводный снаряд и спасательная подводная лодка проекта 666 (переоборудованная из подводной лодки проекта 613) вышли в море в 1961 году (рис. 2). В следующем году, во время испытаний впервые в мире была осуществлена подводная стыковка автономного самоходного аппарата с ПЛ и транспортировка человека «сухим» способом под водой с одной подводной лодки на другую. Таким образом, Россия не только первой послала человека в космос, но, практически одновременно первой реализовала в гидрокосмосе технологию транспортировки человека с одного подводного объекта на другой, которая, несомненно, будет необходима при освоении океана, в том числе - подледных месторождений арктических морей.

Рисунок 2. УПС на палубе спасательной подводной лодки - носителя
Опыт эксплуатации созданного спасательного комплекса в 1962-65 годах проложил путь к созданию первого отечественного полноценного спасательного аппарата СПС проекта 1837 и спасательной подводной лодки специальной постройки проекта 940 «Ленок». Головные образцы, построенные по этим проектам, разработанным в ЦКБ «Лазурит», были сданы флоту соответственно в 1970 и 1976 годах (рис. 3).

Рисунок 3. Спасательная подводная лодка «Ленок» проекта 940
При переходе от спасательного колокола к спасательному подводному аппарату (СПА) к спасательному отсеку, камере присоса и уравнительным цистернам прибавился отсек управления, цистерны главного балласта, аккумуляторные батареи, движительный комплекс и необходимое радио-электронное оборудование. Достаточно подробное описание различных СПА приведено в целом ряде публикаций (например, в [1]). Схема СПА показана на рис. 4.
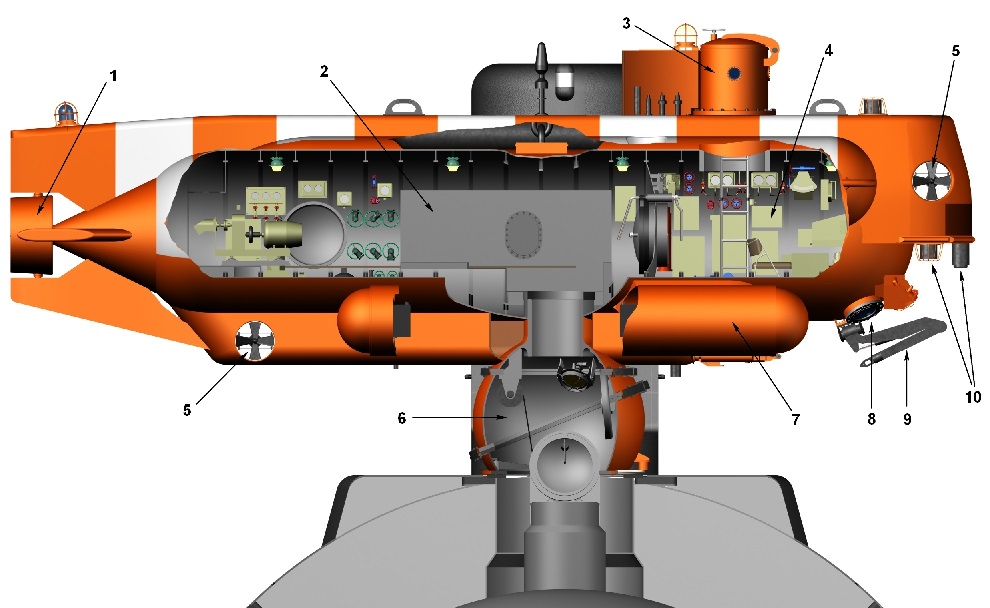
Рис. 4. Схема спасательного подводного аппарата
1 – маршевый движитель; 2 – спасательный отсек; 3 – шахта входного люка; 4 – отсек управления; 5 – лаговый движитель; 6 – камера присоса; 7 – контейнер с аккумуляторной батареей; 8 – иллюминатор; 9 – рабочий манипулятор; 10 – антенны гидроакустических станций
За рубежом, в США к созданию новых спасательных средств приступили после гибели в 1963 году атомной подводной лодки «Thresher». В 1971-72 годах аэрокосмическая фирма «Локхид» сдала флоту 2 глубоководных спасательных аппарата DSRV «Mystic» и «Avalon» (далее DSRV США) (рис. 5). Проект был очень дорогостоящим, но характеристики DSRV США долгое время считались образцовыми.

Рисунок 5. DSRV «Avalon» (США)
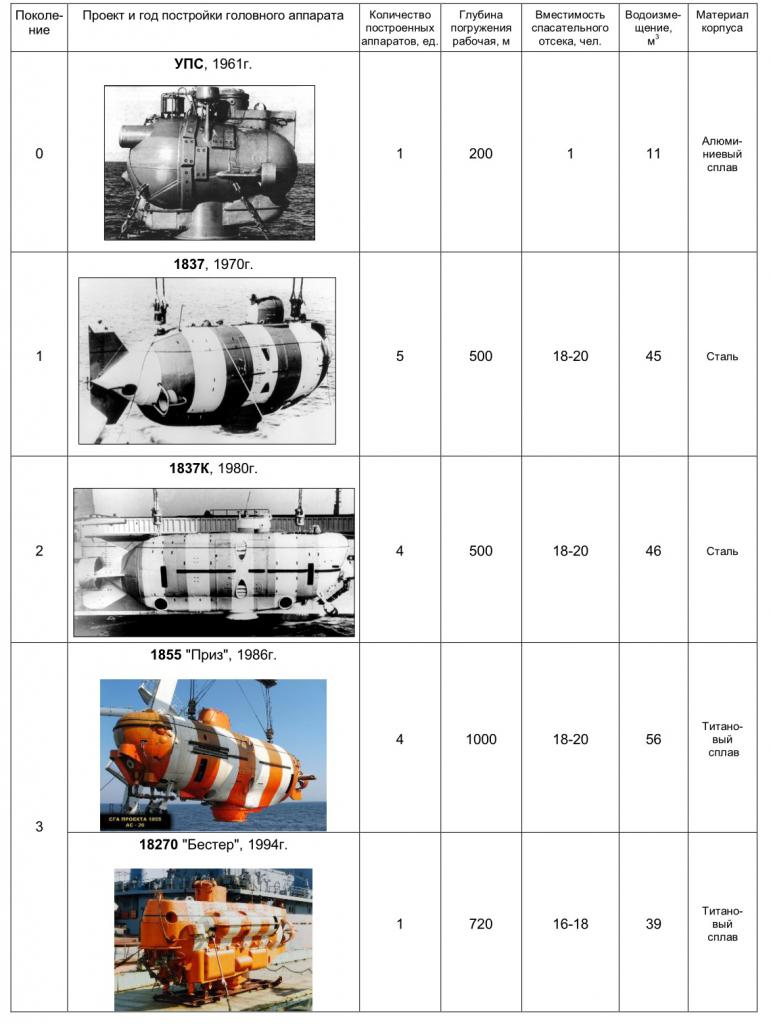
После 1972 года спасательные подводные аппараты строились в Великобритании, Германии, Швеции, Италии, Китае и Японии. Особенно большое количество таких аппаратов в период после 1970 года было построено в России - 14 единиц по 4 проектам (таблица 1).
Развитие отечественных СПА было эволюционным: повышались универсальность, оснащенность радиоэлектронным оборудованием, увеличивалась глубина погружения. Разумеется, в каждом проекте были свои особенности. В 1980 году был сдан флоту спасательный аппарат проекта 1837К, в котором удалось объединить функции спасательного и рабочего аппаратов. Аппарат был оснащен более совершенной гидроакустикой и имел высокие ходовые и маневренные качества. Следует отметить, что мощность маршевого движителя по сравнению с предшествующим проектом 1837 была уменьшена в 2 раза, а скорость выросла за счет более совершенной гидродинамики.
Глубоководный спасательный аппарат проекта 1855 «Приз», который был сдан в 1986 году, отличался от предшественников вдвое большей глубиной погружения и большим объемом радиоэлектронного вооружения. Корпус был выполнен из титанового сплава. Имея водоизмещение, большее, чем у проекта 1837К, аппарат проекта 1855 при том же запасе электроэнергии на борту за счет более совершенной энергетической установки получил увеличенную дальность плавания.
И, наконец, сданный в эксплуатацию в 1994 году аппарат проекта 18270 «Бестер» (с титановым корпусом) при вместимости такой же, что и у СПС проекта 1837, имеет меньшее водоизмещение и меньший подъемный вес, большую глубину погружения, более совершенное радиоэлектронное оборудование и принципиально новые рабочие манипуляторы. На этом аппарате впервые было применено размещение аккумуляторных батарей в забортных контейнерах, приспособленных для быстрой замены на борту судна-носителя. Это позволило снизить потери времени на восстановление запасов электроэнергии на борту аппарата. «Бестер» также первый отечественный авто- и авиатранспортируемый спасательный аппарат. Первая опытная транспортировка этого аппарата на самолёте АН-124 была успешно проведена в 1996 году.
После 2000 года российские спасательные глубоководные аппараты проходят модернизацию в соответствии с общим процессом обновления систем спасания подводников по всему миру. Первый аппарат, прошедший модернизацию по проекту 18551, был сдан флоту в 2008 году.
Таблица 1 Характеристики российских СПА
Анализ технических решений, предлагаемых в ходе этого процесса зарубежными кораблестроителями, показывает, что системы спасания подводников вступают в новый, четвертый этап своего развития. Причем на этом этапе решается задача повышения не только функциональной, но и экономической эффективности.
Автономные спасательные аппараты, являвшиеся главным инструментом систем спасания подводников последние 35 лет, как и любые другие технические системы, обладают своими недостатками. При той же вместимости, что и у спасательного колокола, автономный аппарат имеет большее водоизмещение. Соответственно для аппарата нужен больший носитель, эксплуатация которого обходится дороже. Например, при увеличении подъемного веса аппарата в 2,0…2,5 раза стоимость строительства требующегося судна-носителя с соответствующим спуско-подъемным устройством и его эксплуатации увеличивается в 1,2…1,5 раза. Потеря постоянной связи с надводным носителем делает проблемой установление контакта с ним для возвращения на борт при сильном волнении моря. Кроме того, автономный аппарат существенно ограничен по запасам энергии и мощности движителей, что в ряде случаев не позволяет ему осуществить посадку на комингс-площадку аварийной подводной лодки. Когда случилась трагедия с атомной подводной лодкой «Курск», в первые дни в средствах массовой информации передавали, что ее крен достигает 45 градусов, а скорость течения – 2,5 узла. При таком сочетании параметров ни один из существующих в мире автономных спасательных аппаратов не может состыковаться с комингс-площадкой, удерживаясь с помощью своих движителей.
Между тем, за годы, прошедшие с момента создания первых автономных спасательных подводных аппаратов, появились новые технические средства, позволяющие разрешить противоречия как второго, так и третьего этапов развития систем спасания подводников.
Во-первых, надводные суда стали оснащаться системами динамического позиционирования, обеспечивающими удержание судна в точке при волнении до 5…6 баллов и силе ветра до 6…7 баллов. То есть стало возможным работать с помощью спасательного колокола без предварительной установки рейдового оборудования и без соответствующих потерь времени. Однако, для работы системы динамического позиционирования требуется значительная мощность энергетической установки судна, что значительно увеличивает его стоимость. Энергетически выгоднее обеспечить позиционирование небольшого объекта – самого спасательного средства.
Еще в конце 80-х годов ХХ века фирма «Брукер» (ФРГ) создала самоходный водолазный колокол, который мог отходить от судна-носителя на расстояние до 300 м. К этому моменту существенно возросли функциональные возможности дистанционно управляемых необитаемых подводных аппаратов (ROV): мощность энергоустановок обеспечивала работу аппаратов массой 3…4 т при скорости течения до 2…3 узлов, по трос-кабелю передавалась мощность до 180 кВт. Автоматическое управление таким аппаратом и быстродействующей лебедкой с трос-кабелем позволяло удерживать аппарат в нужной точке даже при заметном смещении судна-носителя.
Реальностью стало создание дистанционно управляемого привязного самоходного спасательного колокола, снабженного поворотной, автоматически управляемой камерой присоса. Фактически был создан «гибрид» из СК и ROV. При этом из структуры СПА были исключены отсек управления и аккумуляторная батарея, а на судно-носитель, то есть в надсистему, в соответствии с «законом сохранения сложности» [16] были переданы функции управления и обеспечения энергией. Первым из таких спасательных средств стала «Remora», поступившая на вооружение ВМС Австралии в 1995 году [35]. Спасательный комплекс, в состав которого входит этот привязной спасательный аппарат, включают в себя, кроме того, декомпрессионные барокамеры и вспомогательные модули, выполненные в габаритах морских стандартных контейнеров. Размещать эти комплексы предполагается на временно арендуемых надводных носителях, в качестве которых могут использоваться суда обеспечения морских буровых и нефтедобывающих платформ. Небольшой подъемный вес привязного колокола-аппарата позволяет применять суда-носители умеренного водоизмещения - до 3000 т.
Современная развитая зарубежная индустрия морской добычи позволяет включить в перечень потенциальных судов-носителей подобных спасательных комплексов несколько сотен единиц, что обеспечивает высокую вероятность иметь подходящее судно в требуемый момент времени в порту, ближайшем к месту аварии. Элементы спасательного комплекса в этот порт будут доставляться самолетом.
Главные достоинства описанного подхода к формированию спасательных систем нового поколения – это мобильность и сравнительная дешевизна. Ведь львиную долю в стоимости эксплуатации спасательной системы составляют затраты на содержание судов-носителей. Фактически из структуры спасательной системы было исключено специальное спасательное судно как постоянный элемент. Его функции должен исполнять временный элемент из метасистемы, выходящей за рамки ВМС.
Первая мобильная спасательная система была создана в США после ввода двух DSRV и предусматривала доставку аппарата самолетом в ближайшую к месту аварии базу ВМС США (в том числе и за рубежом), откуда он транспортировался на специально дооборудованной ПЛ. В данном случае все элементы системы входили в сферу Минобороны США. Мобильная спасательная система с привлечением любых подходящих надводных носителей была создана позже в Великобритании. В состав этой системы входил СПА LR-5.
Общая схема развития технических средств для спасания подводников «сухим» способом, отражающая изложенные этапы и тенденции, представлена на рис. 6.
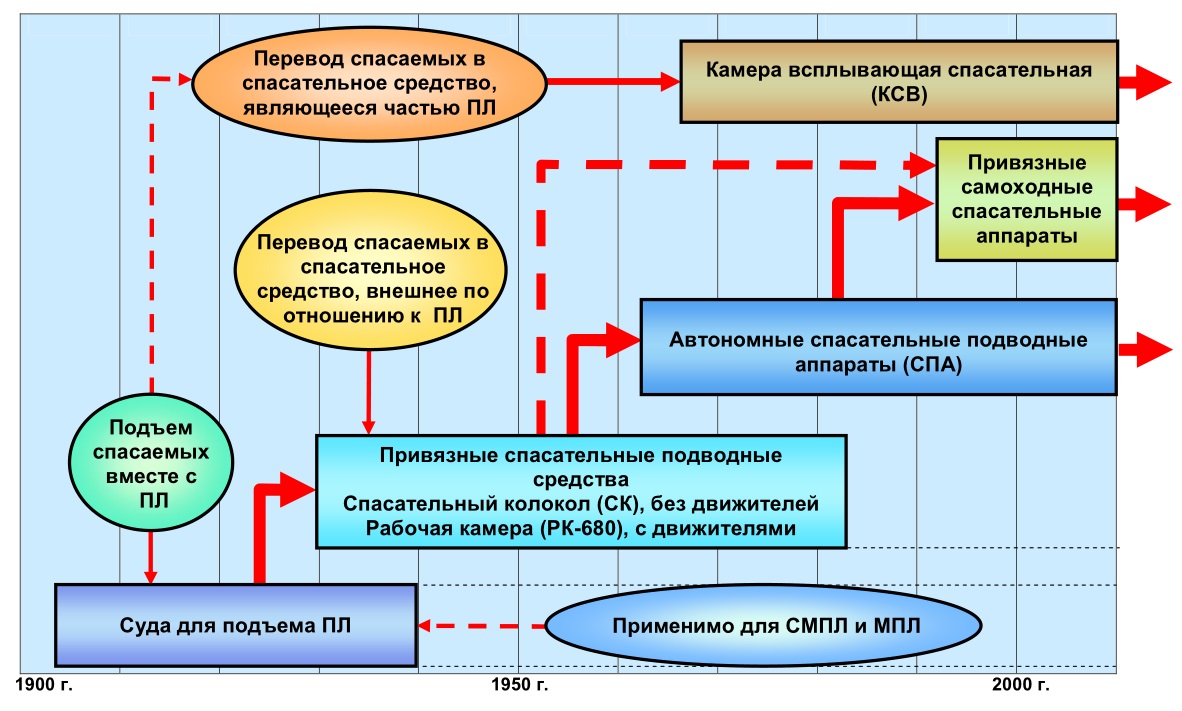
Рисунок 6. Схема развития технических средств для спасания подводников «сухим» способом
2 Идущий после 2000 года во всём мире процесс обновления систем спасания подводников проявился в первую очередь в том, что в 2008 году вступили в строй две новые спасательные системы NSRS (страны НАТО Великобритания, Норвегия, Франция) [37], [39] и SRDRS (США) [33], [34], [36], в состав которых входят СПА принципиально разных типов. В России завершается создание СПА нового (4-го) поколения проекта 18271 [3], [14], [15]. Основные характеристики спасательных аппаратов последнего поколения приведены в таблице 2, а внешний вид – на рис. 7, 8 и 9.
Таблица 2. Характеристики спасательных подводных аппаратов последнего поколения
|
Спасательная система |
- |
NSRS |
SRDRS |
|
|
Разработчик СПА |
ОАО «ЦКБ «Лазурит» |
«Perry Slingsby Systems» |
«Ocean Works International» |
|
|
Наименование СПА |
Проект 18271 СГА «Бестер-1» |
SR «Nemo» |
PRM «Falcon» |
|
|
Тип СПА |
автономный |
автономный |
привязной, дистанционно-управляемый |
|
|
Глубина погружения рабочая, м |
720 |
610 |
610 |
|
|
Вместимость по спасаемым, чел. |
наибольшая |
22 |
15 |
16 |
|
гарантированная |
20 |
12 |
13 |
|
|
Наибольшее допустимое избыточное давление в отсеке СГА, МПа (ати) |
0,6 (6) |
0,5 (5) |
0,4 (4) |
|
|
Наибольший допустимый угол наклона комингс-площадки ПЛ к горизонту, град |
60 |
60 |
45 |
|
|
Водоизмещение нормальное, т |
40,6 |
29,7 |
около 19 |
|
Каждый из этих новых аппаратов использовал опыт создания и эксплуатации СПА предыдущих поколений, разработанных теми же фирмами. Базой для SR «Nemo» послужил СПА ВМС Великобритании LR-5, для PRM «Falcon» - СПА «Remora», а для «Бестер-1» - СПА проекта 18270. При этом в характеристиках и конструкции аппаратов нашли своё отражение новые требования к процессу спасания подводников и к типам спасательных систем, в которые входят эти СПА.

Рисунок 7. Автономный спасательный подводный аппарат SR «Nemo»

Рисунок 8. Привязной спасательный подводный аппарат PRM «Falcon»
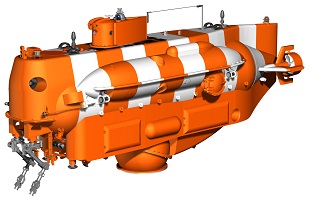
Рисунок 9. Автономный спасательный подводный (глубоководный) аппарат СГА «Бестер-1»
Подводные аппараты SR «Nemo» и PRM «Falcon» являются специализированными спасательными аппаратами, используемыми только с надводных носителей в составе мобильных систем спасания подводников NSRS и SRDRS соответственно. Одной из основных характеристик этих систем является продолжительность развёртывания, типовой сценарий которого включает следующие составляющие:
- продолжительность работ от момента приказа на развертывание до погрузки в самолет (включая перевозку от базы до аэродрома продолжительностью 1 час) – 24 часа;
- перелет – 6 часов;
- перегрузка с самолета на автотранспорт – 8 часов;
- перевозка автотранспортом в точке прибытия – 4 часа;
- продолжительность работ от прибытия в порт до готовности выхода в море 18 ч.
- переход морем в район выполнения спасательных работ – 12 часов.
Итого общая типовая продолжительность развёртывания – 72 часа.
В реальных условиях продолжительность развёртывания может быть иной. К примеру, принятая продолжительность перелета соответствует номинальной грузоподъёмности большинства транспортных самолетов. В то же время продолжительность перелета между Кольским полуостровом и полуостровом Камчатка составляет 10 часов (при соответствующем снижении грузоподъемности самолета).
Продолжительность перехода морем 12 часов соответствует радиусу действия спасательной системы 150…200 миль от порта. Данный радиус примерно перекрывает диапазон глубин до 200 м, на который в соответствии с принятым сценарием приходится до 60% аварий с затоплением ПЛ (при общем диапазоне глубин до 600 м) [43]. Компьютерное моделирование для акваторий России дает несколько иной результат: на аварии в диапазоне глубин до 200 м из общего диапазона 600 м приходится 80% случаев, что лучше соответствует известным данным по глубинам затонувших ПЛ [25]. В целом операции по спасанию подводников из-под воды вероятнее всего могут производиться в ближней спасательной зоне, находящейся в радиусе до 400 миль от баз ПЛ, хотя в ряде районов дистанция от баз флота до границ глубины 600 м может достигать 700…800 миль.
Типовой сценарий использования мобильной спасательной системы предполагает, что через 24 часа после начала развертывания в нужном порту уже будет находиться требуемое судно, на котором как на временном носителе будет устанавливаться система. Подходящие суда (типа OSV) широко применяются для обслуживания морских месторождений. Их много в Северном и Норвежском морях, а также в Мексиканском заливе. А вот в Средиземном море судов, на которые можно установить NSRS только в урезанной комплектации, немного. Проблематично также обеспечение такими судами у западного и восточного побережья США и Канады. Попытка использовать в этих районах для размещения мобильной спасательной системы барж требует оснащать эти плавсредства жилыми модулями для размещения людей, модулями энерго и жизне обеспечения. Кроме того, для выхода таких барж в море требуется привлекать несколько дополнительных судов, а допустимая степень волнения моря, при которой можно проводить спасательную операцию, существенно снижается, уменьшая эффективность спасания. Выяснилось также, что стоимость срочного фрахта судов слишком нерентабельна и выгоднее брать суда в долгосрочную аренду [41], что становится мало отличимым от постоянного базирования.
Учитывая проблемы с обеспечением временными носителями, страны, в акваториях которых нет судов с требуемыми техническими характеристиками, ориентируются на традиционные спасательные суда, имеющие постоянное базирование. В частности, Италия, которая до 2000 года намеревалась участвовать в создании NSRS, отказалась от этого, решив продолжить использование имеющегося СС «Anteo». Отказалась и Турция, поскольку в восточной части Средиземного и Черном морях вообще нет подходящих судов. Есть информация о намерении Турции строить для своих ВМС 2 специализированных спасательных судна [31]. В акваториях России инфраструктура морской добычи только начинает развиваться. Подходящие для мобильной спасательной системы суда есть только у северо-восточной оконечности острова Сахалин, да и то в недостаточном для обеспечения надежного фрахта количестве. Кроме того, их использование не обеспечит выполнения требования по прибытию в течение 24 часов во Владивосток или Петропавловск-Камчатский.
Очевидно, что наилучший результат может дать разумное сочетание постоянного базирования спасательных систем с мобильным. В соответствии с этим СПА «Бестер-1» является более универсальным: он может базироваться как на специальных спасательных судах, так и на временных носителях (в составе соответствующих мобильных комплексов), а также на подводных лодках. И кроме спасания подводников может привлекаться к выполнению подводно-технических работ.
3 Технология спасания подводников с использованием СПА в настоящее время не является единственно возможной. На схеме рис. 6 показано еще одно средство спасания «сухим» способом, устанавливаемое на самой подводной лодке: при невозможности всей подводной лодки всплыть на поверхность людей можно было спасти вместе с всплывающей отдельной частью этой подводной лодки. В СССР в 1958-1959 годах было разработано комбинированное спасательное устройство, представляющее собой многоразовую спасательную камеру, всплывающую на тросе и подтягивающуюся на нем же к подводной лодке. В камеру помещалось 2 человека. Испытания и отработка такой камеры производились на подводной лодке проекта 613С, разработанной ЦКБ «Лазурит». Затем это устройство было установлено на ряде проектов атомных подводных лодок второго поколения. В 1955-1960 годах СПМБМ «Малахит» была разработана одноразовая всплывающая спасательная камера, вмещающая весь экипаж. Впервые такая камера была установлена на атомной подводной лодке проекта 705. Затем – на подводных лодках еще шести проектов. За рубежом всплывающая камера установлена только на подводных лодках проекта 209 (тип 1500), построенных в ФРГ для Индии. Широкому применению этого спасательного средства мешает тот факт, что его установка приводит к усложнению конструкции корпуса и росту водоизмещения. Всплывающие камеры невозможно устанавливать на подводных лодках небольшого водоизмещения. Совершенствование всплывающих камер продолжается только в России, хотя установка таких средств предусматривается также в ряде перспективных проектов зарубежных атомных подводных лодок.
Более распространенным конкурентом для СПА является спасание «мокрым» способом, в первую очередь – методом свободного всплытия, предусмотренным на всех подводных лодках. В качестве примера в таблице 3 приведены рекомендации по принятию решения по выходу из аварийной ПЛ, находящейся на грунте, принятые в ВМС США [38].
Таблица 3 Рекомендации ВМС США по действиям экипажа аварийной ПЛ
|
Перечень факторов, которые |
Действия экипажа аварийной ПЛ |
|
|
должны учитываться экипажем аварийной ПЛ |
Ожидание прибытия спасательных сил |
Самостоятельный выход из ПЛ |
|
1. Глубина, на которой находится аварийная ПЛ, м |
более 137 |
менее 137 |
|
2. Избыточное давление воздуха в отсеке-убежище, МПа |
более 0,07 |
менее 0,07 |
|
3.Тенденция изменения давления в отсеке |
не повышается |
повышается |
|
4. Поступление забортной воды в отсек |
отсутствует или прекращено |
продолжается и его не остановить |
|
5. Содержание О2 / СО2 в отсеке, % |
выше 13 / менее 3 |
менее 13 / более 6 |
|
6. Тенденция изменения содержания СО2 |
не увеличивается |
увеличивается |
|
7. Состояние системы регенерации |
обеспечивается регенерация воздуха |
система регенерации не исправна |
|
8. Состояние остальных (кроме О2 / СО2) составляющих атмосферы |
нормальное |
невозможно дышать без средств защиты органов дыхания |
|
9. Погодные условия на поверхности моря |
неблагоприятные |
благоприятные |
|
10. Наличие спасательных сил в районе аварии |
отсутствуют |
присутствуют |
|
11. Состояние личного состава в отсеке-убежище |
не в состоянии осуществить самостоятельный выход из ПЛ и не может держаться на поверхности |
в состоянии осуществить самостоятельный выход из ПЛ и может удержаться на поверхности |
Разумеется, условия перечисленных 11-ти факторов на практике далеко не всегда так наглядно разделяются, как в этой таблице. Реальные сочетания этих условий могут быть весьма различными. В целом же можно сделать следующий вывод: при наличии весомых шансов на успех надо всегда сначала попытаться самостоятельно выйти из ПЛ «мокрым» способом, а в случае их отсутствия оставаться в отсеке аварийной ПЛ и ждать прихода спасательных сил, которые смогут осуществить спасение «сухим» способом. Неслучайно в англоязычных документах спасание «мокрым» способом обозначают термином «покидание» (Escape), а термином «спасание» (Rescue) определяют «сухой» способ, подчеркивая их альтернативный характер. Главным ограничением применения «покидания» являются небольшая величина повышенного давления в ПЛ, при котором возможен выход, и неблагоприятные погодные условия на поверхности воды (низкая температура, сильное волнение), которые могут привести к гибели подводников, самостоятельно вышедших из ПЛ.
Аварийные ситуации, при которых ПЛ не удается вывести в надводное положение и/или удержать в нем, считаются «запроектными» авариями [5], доля которых не должна быть велика. Однако наложение «человеческого фактора» делает картину обратной. В соответствии со сценариями экспертов НАТО [43] доля аварий, при которых удается ограничиться оказанием помощи ПЛ в надводном положении, составляет около 30%. Из остальных случаев в лучшем случае при 15% аварий удастся осуществить успешное «покидание» (с учетом данных [38]). Поэтому пространство ситуаций, требующих использования СПА, остается достаточно большим. Кроме того, у всплывающих камер и у «покидания» подводниками ПЛ есть одно ограничение, которое существенно для Российских северных акваторий: они вообще не могут применяться подо льдом. Присутствие человека в таких районах неизбежно увеличится при освоении шельфа Арктических морей, поскольку необитаемые роботизированные средства до сих пор не могут полностью заменить человека при выполнении подводных работ даже в районах со свободной водой [18]. Поэтому задача спасания человека с обитаемых подводных плавсредств со временем будет становиться все более актуальной. Для решения этой задачи спасательные подводные аппараты являются наиболее предпочтительными, поскольку более универсальны и лишены ограничений альтернативных технологий. Кроме того, применение СПА создает минимальное психологическое напряжение для спасаемых и не требует их особой подготовки.
Литература
1. Аварийно-спасательные и судоподъемные средства. / Фигичев А.И., Васильев Ю.В., Крылов Г.К., Сытин А.В., Ястребов В.С. – Л.: Судостроение. 1979
3. Агишев Е.Р., Ерпулев М.А., Подкопаев Д.М., Голдовский Б.И., Дикарев Н.Ф. Модернизация спасательного глубоководного аппарата «Бестер» // Подводные технологии и мир океана. 2005. № 2. С. 42-45
4. Альтшуллер Г.С. Найти идею – Новосибирск: Наука, 1986
5. Антонов А.М. Концептуальные проблемы конструктивного обеспечения спасания подводников // Судостроение. 2010. № 3, с. 32-38. № 4, с.26-29
14. Голдовский Б.И. История и основные тенденции развития систем спасения подводников // Подводные технологии и мир океана. 2006. № 1. С. 48-55
15. Голдовский Б.И. Современное состояние и прогноз развития спасательных глубоководных аппаратов // Морские интеллектуальные технологии. 2011. № 4. С. 3-6
16. Голдовский Б.И., Вайнерман М.И. Рациональное творчество – М.: Речной транспорт, 1990
17. Данмор С. Погибшие подлодки. Величайшие катастрофы – от «Ханли» до «Курска». – М.: Мир книги, 2005
18. Караваев Р.Н. Подводно-технические работы на Каспийском шельфе // Морские интеллектуальные технологии. 2010. № 2. С. 45-54
19. Козюков Л.В. Создание и развитие спасательных судов ВМФ // Судостроение. 1997. №5
21. Лубянов А.Н. Прорыв в глубину – Севастополь: 2003
23. Молотов С.В., Дикарев Н.Ф. Создание первых подводных аппаратов для спасения экипажей аварийных ПЛ // Тайфун. 1999. № 3
25. Нарусбаев А.А. Катастрофы в морских глубинах – Л.: Судостроение, 1989
27. Спасатели Военно-морского флота – М.: Военное издательство, 1996
30. Толл Д. Подводные лодки и глубоководные аппараты. – М.: ЭКСМО, 2004
31. Турецкий подводный флот – властелин глубин Черного моря. Армейский вестник. 17.02.2011 - http://army-news.ru/2011/02/tureckij-podvodnyj-flot
33. Dunlap G.H., Halwachs J.E. New Submarine Rescue System is First Deployed During International Exercise. Sea Technology.2008 // www. sea-technology.com
34. Hoffer D. Submarine Rescue, Diving and Recompression System (SRDRS). Status Update. / SMERWG – Garmish, Germany, May 2007 (PMS394B)
35. Jane’s Fighting Ships, 2001-2002, pp. 22, 32
36. Jane’s International Defense Review, November 2004, v.37, p.18
37. NATO Submarine Rescue System. NSRS. / SMERWG – Garmish, Bavaria, 30 May 2007 (Rolls-Royce)
38. Naval Sips’ Technical Manual. Charter 594. Salvage – Submarine Safety Escape and Rescue Devices. 1995 – http://www.fas.org/man/dod-101/sys/ship/nstm/index.htm
39. NSRS General Description. MOSHIP Requirements / Rolls-Royce, 2008
41. SRDRS/NSRS. MOSHIP/VOO Update. Steve Thoresen (PMS394R), Paul Bray (NSRS-PM). May 2007
43. User Requirements Document. Baseline definition of the Escape & Rescue Requirement// de&s. Ministry of Defence. UK – 2007