Практика использования системы Станиславского
при решении технических задач
«Весь мир – театр.
В нём женщины, мужчины – все актёры.
У них свои есть выходы, уходы,
И каждый не одну играет роль»
В. Шекспир
Если уж это так, то играть выбранные нами роли, в том числе и роль изобретателя, нужно с пониманием того, как это делают профессиональные актёры. Поэтому мой интерес к системе Станиславского вполне объясним.
К.С. Станиславскому в этом году исполнилось 150 лет (родился 17 января 1863 г.)
Его система – система актерского творчества, имеет огромную популярность во всем мире. За прошедшее время эта система превратилась в особый раздел психологии - науку о человеческих действиях, являющихся материалом искусства актера.
Основной метод системы - «Метод физических действий», суть которого заключается в том, что для решения любой задачи, для достижения любой цели нужно подлинно, обоснованно и целесообразно физически действовать. Физическое действие – это не просто физическое движение, а физическое движение, направленное на достижение определенной цели. Цель, и только цель, определяет каждое данное действие.
«Изучение физических действий и овладение ими открывает перспективу построения культуры актерской профессии, а может быть, и культуры действий вне этой профессии» [1]
Поскольку конференция посвящена практике применения методических инструментов и имеются ограничения по объему представляемых материалов, я не могу подробно остановиться на особенностях системы Станиславского, интересных и полезных с точки зрения методологии решения изобретательских задач. Хочу только заявить, что система Станиславского – это ТРИЗ в актерском искусстве. Система Станиславского, как и ТРИЗ, является системой совершенствования человека, занимающегося творчеством. Если в ТРИЗ основополагающие понятия – это «задача», «цель», «над-цель», «достойная цель», «физический эффект», то в системе Станиславского - «задача», «сверхзадача», «сверх-сверхзадача», физическое действие, которые полностью соответствуют друг другу. Если материал актера – физические действия, то материал изобретателя – физические эффекты, что по сути своей – одно и то же. Эти системы дополняют и обогащают друг друга при сознательном использовании их методических средств, что я и хочу показать на примере практического решения реальной технической задачи.
Основной тезис системы Станиславского – «творить вдохновенно». Поэтому система рекомендует решение задач начинать с сознательной подготовки себя к творчеству по вдохновению с помощью приёмов психотехники. Эта подготовка должна проводиться не только непосредственно перед решением задачи, но стать образом жизни, чтобы быть готовым к творчеству всегда. Такая подготовка присутствовала в похожем виде в программе Московского общественного института технического творчества (МОИТТ) в 80-е годы. В рамках данной работы описать приёмы психотехники системы не представляется возможным. Поэтому перейдем к задаче.
Задача возникла полтора века назад и касается постройки двухколесного велосипеда с педальным приводом на переднее управляемое колесо.
Каждый, кто создаёт такой велосипед, сталкивается с так называемым «педально-рулевым» эффектом. Он заключается в том, что усилия ног, действующие на педали, установленные на вилке переднего управляемого колеса, не только вращают это колесо, но ещё и поворачивают его вилку, мешая тем самым управлению велосипедом, а поворот вилки колеса при маневрировании мешает движению ног.
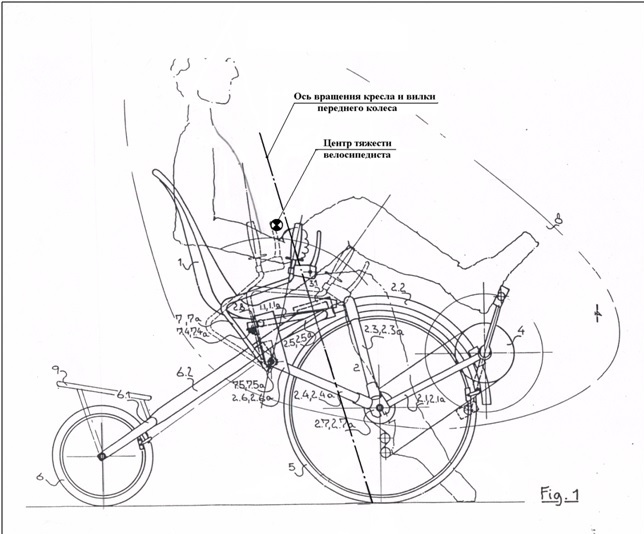
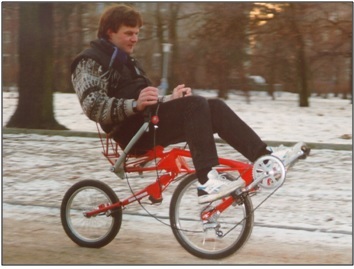
На первых таких велосипедах вращающий момент от усилий ног, действующий через педали на переднюю вилку, стали компенсировать вращающим моментом от усилий рук, действующих на рычаги управления (рис.1). В несколько усовершенствованном виде так продолжают делать и теперь (рис.2).
Этот способ привлекает своей простотой, но, постоянная необходимость удерживать управляемое колесо от непроизвольного поворота усложняет управление велосипедом и утомляет велосипедиста, что заставило искать другие средства преодоления этого нежелательного эффекта.
|
Рис.1 Конструкция Ф.Фишера 1850г.
|
Рис.2 Конструкция А.Устинова.2009г. |


За прошедшее время были предложены следующие варианты действий:
1. Установить каретку педалей не на передней вилке, а на раме велосипеда (рис.3).
В этом варианте поворот вилки колеса при маневрировании всё равно мешает движению ног, а кроме того усложняется конструкция, снижается КПД и растет вес трансмиссии.

Рис.3
2. Направить линию действия усилий ног вдоль оси вращения передней вилки (рис.4, 5).
В этом случае исключается низкая посадка велосипедиста, уменьшается расстояние между колесами, что ухудшает продольную устойчивость велосипеда.
|
Рис.4 Велосипед «Пенни-фартинг» Великобритания (1874-1892 г.)
|
Рис.5 Велосипед 2006 г.
|


3. Наклонить и отодвинуть ось вращения передней вилки так, чтобы расстояние между осью вращения этой вилки и осью каретки педалей было как можно больше (рис.6).
При этом угол нежелательного поворота передней вилки уменьшается, но совсем не исчезает. Кроме того, из-за увеличения угла отклонения оси вращения передней вилки от вертикали ухудшается поперечная устойчивость велосипеда.
|
|

Рис.6 The Chinkara
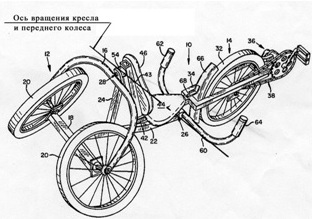
4. Установить сиденье на передней вилке, чтобы они поворачивались вместе (рис.7,8).
|
Рис.7 Велосипед по патенту DE 4206683 A1
|
|
Рис.8 Hans-Ulrich R E I M E R S “Kalle-3e”
|
Тогда вращающий момент от усилий ног, действующих через педали на переднюю вилку, полностью компенсируется вращающим моментом сил, действующих на сиденье.
Но для поперечной устойчивости велосипеда угол отклонения оси вращения передней вилки от вертикали должен быть порядка 15°, а центр тяжести велосипедиста должен находиться на оси вращения передней вилки, чтобы при поворотах вилки с сиденьем он оставался в плоскости велосипеда. Эти условия накладывают ограничения на расположение велосипедиста относительно колес и земли. В частности для обеспечения низкой посадки велосипедиста угол отклонения оси вращения передней вилки от вертикали должен быть увеличен до недопустимых значений, что вынуждает ставить дополнительные колеса (рис. 9, 10) .
|
Рис. 9 США, патент № 4572535 от 25.02.1986 г. |
Рис. 10 |
|
|
|

Таким образом, из предлагаемых вариантов, только в последнем нежелательный эффект не проявляется, но проявляются другие недостатки.
В системе Станиславского утверждается, что всякое свое действие человек совершает, исходя из принципа «экономии сил», и для преодоления возникающих трудностей в первую очередь пробует самые простые, с его точки зрения, способы [2]. ТРИЗ тоже рекомендует, прежде всего, решать мини-задачу, т.е. оставить в системе, дающей желаемый эффект, все как есть, но убрать недостаток. Поэтому за основу разработки следует взять последний вариант.
Сформулируем задачу, для чего последуем рекомендации К.С.Станиславского:
«Задачу нужно определять не именем существительным, а непременно глаголом» и «Переименуйте задачу из имени существительного в соответствующий глагол, а именно: прежде чем назвать глагол, поставьте перед трансформируемым существительным слово "хочу": "хочу делать... что?"» [3].
Итак, сформулируем задачу в виде своих желаний:
- Я хочу расположить центр тяжести велосипедиста на оси вращения передней вилки, угол отклонения которой от вертикали порядка 15°, (чтобы при поворотах вилки с сиденьем он оставался в плоскости велосипеда);
- Я хочу расположить центр тяжести велосипедиста на расстоянии примерно 0,5 м от земли (чтобы обеспечить безопасность езды и удобство посадки велосипедиста), и посередине между колесами (для продольной устойчивости велосипеда и уменьшения вертикального перемещения велосипедиста при наезде на препятствия).
Нарисуем эскизы желаний (рис.11, 12):
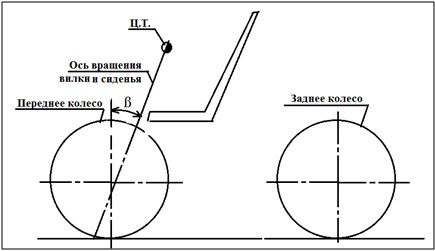
Рис. 11 – то, как должно быть по 1-ому желанию

Рис. 12 – то, как должно быть по 2-ому желанию
Сформулируем задачу в виде одного желания:
Я хочу одновременно расположить центр тяжести велосипедиста на оси вращения передней вилки и в стороне от нее, или иначе говоря,
Я хочу провести ось вращения передней вилки через центр тяжести велосипедиста и в стороне от него.
Нарисуем эскиз и этого желания (рис. 13, 14):

Рис. 13

Рис. 14
Из эскизов ясно видно, что в системе на самом деле имеется две оси - ось вращения передней вилки и ось вращения сиденья велосипедиста, которые в исходной конструкции совпадают.
Видимо, чтобы разрешить противоречие желаний, эти оси нужно как-то разделить в пространстве и как-то связать между собой, чтобы поворот передней вилки приводил к повороту сиденья с велосипедистом.
Для снятия психологической инерции сформулируем желание без специальных терминов:
Я хочу нарисовать линию, выходящую из точки А под определенным наклоном к вертикали и проходящую через точку В.
Нетрудно догадаться, что это возможно, если линия будет кривой (рис. 15).
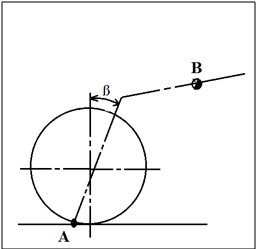
Рис. 15
Таким образом, получается система (рис.16), в которой ось вращения передней вилки, имеющая необходимый угол наклона, изгибается и превращается в ось вращения сиденья велосипедиста.
|
Рис. 16 Велосипед по патенту РФ № 2239578 |
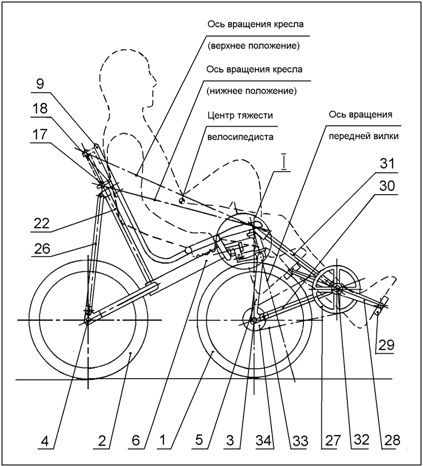
Это решение объединяет в себе противоречивые желания.
Эксперименты с опытным образцом (рис.17, 18) показали правомерность найденного решения.
Действие ног на педали, установленные на вилке переднего управляемого колеса, приводит только к вращению этого колеса, без поворота его вилки, при этом расположение велосипедиста определяется требованиями безопасности езды, удобства посадки, устойчивости велосипеда и уменьшения вертикального перемещения велосипедиста при наезде на препятствия.
|
Рис. 17 |
Рис. 18
|


Найденное решение в усовершенствованном варианте было применено для разработки и трёхколёсного переднеприводного велосипеда, в котором отсутствует «педально-рулевой» эффект (рис. 19).
|
Рис. 19 Велосипед по патенту РФ № 89 481
|

Как было показано, при решении задачи использовался фактически один инструмент – формулирование задачи способом Станиславского, хотя в его системе имеются и другие инструменты, например, «магическое Если бы».
В практической деятельности конструктора, изобретателя постоянно возникает множество задач, перетекающих одна в другую. В этих условиях формулирование задач в виде желаемых действий является очень эффективным средством их решения, но и не заменяющим весь арсенал ТРИЗ.
Надеюсь, что мне удалось своим рассказом о решении технических задач с помощью системы Станиславского пробудить внимание и интерес к этой системе.
Литература:
1. Ершов П.М. Потребности человека, М., 1990.
2. Ершов П.М. Технология актерского искусства, М., ТОО «ГОРБУНОК», 1992.
3. Станиславский К. С. Работа актера над собой. М., Гос. изд-во "Худож. лит.", 1938.