Б.И.Голдовский
О динамичности и управляемости технических систем
1 Законы повышения степени динамичности и управляемости в ходе развития технических систем являются одними из наиболее наглядных, примеры проявления которых практически каждый может найти в своей повседневной жизни. Поэтому эти законы входят в основные современные системы законов развития технических систем (ЗРТС) [1], [2], [3]. При этом подробно рассмотрены формы реализации этих законов (с примерами) и указана связь данных законов с законом повышения идеальности технических систем (ТС). Однако механизмы действия этих законов, а также некоторые особенности их проявления в развитии ТС остались не достаточно освещенными. Выявление причин и условий, при которых человек вынужден повышать степень динамизма и управляемости ТС, необходимо для того, чтобы ЗРТС кроме выполнения иллюстративно-объяснительной функции могли быть и инструментом.
Следует отметить, что тенденция развития техники в направлении динамизации была отмечена Г.С.Альтшуллером еще в 1963 году [4]: «Динамизация» машин: машины с фиксированными характеристиками (вес, объем, форма и т.д.) вытесняются меняющимися в процессе работы машинами; «жесткие» конструкции вытесняются «гибкими». Это заметная тенденция в развитии современной техники – разделение машины на несколько гибко сочлененных секций». Однако в системе ЗРТС, опубликованной в конце 70-х годов [5], законов повышения степени динамичности и управляемости ТС нет. Они предполагались в законе повышения степени вепольности. Выделение указанных законов как самостоятельных элементов системы ЗРТС началось только в начале 80-х годов (см., например, [6], [7], [8]).
2 Прежде, чем рассматривать механизмы действия указанных выше законов, целесообразно уточнить представление о динамичности и управляемости. Под динамичностью обычно представляется способности системы изменять свои характеристики во времени. Соответственно, предполагается, что есть системы статические (в которых ничего во времени не изменяется) и динамические [2]. Однако каждая система имеет множество характеристик, некоторые из которых обязательно изменяются во времени. Например, тепловые деформации при изменении температуры окружающей среды. Поэтому, если формально опираться просто на наличие или отсутствие изменения характеристик системы во времени, то получается, что в земных условиях статических систем нет. Соответственно нет перехода от статических систем к динамическим. На практике деление на статические и динамические системы обычно производится неформально (интуитивно), выбирая из всего множества характеристик только те, которые должны приниматься в расчет в данном конкретном случае [9]. То есть, опираясь только на существенные характеристики.
Есть также группа систем, к которым трудно применить принцип изменчивости во времени, но которые нельзя отнести и к статическим системам. Это – системы, в которых реализованы стационарные процессы. Например, имеем систему в виде трубопровода, по которому транспортируется жидкость. Поскольку налицо движение частиц жидкости (каждая частица жидкости в разные моменты времени занимает новое положение в пространстве), систему нельзя считать статической. В то же время все основные общие характеристики потока жидкости (средняя скорость частиц жидкости, расход, давление в жидкости) могут не изменяться во времени. То есть налицо разное отношение к динамичности на разных системных уровнях одного и того же объекта.
Можно отметить подход к определению динамических систем, принятый в кибернетике: кибернетика занимается только динамическими и управляемыми системами [10]. При этом система считается динамической, если она может принимать множество различимых состояний [9]. А процедура выбора из множества возможных состояний предпочтительного и составляет суть управления [10]. Применительно к ТС управляемость обычно представляют как способность системы перейти из одного состояния к другому при наличии специального целевого воздействия. Например, если построить шалаш с постоянно открытым входным отверстием, то это можно будет считать не управляемой (статической) системой. Если же входное отверстие завесить, к примеру, куском ткани (брезента), который целевым образом можно переводить из состояния «закрыто» в состояние «открыто» и обратно, то получаем динамическую управляемую систему. Однако такой подход слишком упрощен. В кибернетике возможность управления предполагает наличие некоторого регулятора, реализующего обратную связь. При этом наличие регулятора не связано жестко с динамичностью системы. Он может добавляться к системе, уже являющейся динамической. Причем форма технической реализации этого регулятора может быть совершенно не динамичной.
Рассмотрим для примера скуловые кили судна, используемые для уменьшения амплитуд бортовой качки (рис. 1).
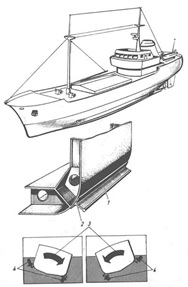
Рисунок 1 – Скуловые кили судна
1 – скуловой киль; 2 – утолщенный лист обшивки; 3 – направления наклонов судна при качке; 4 – направления сил, возникающих на скуловых килях и противодействующих качке
Судно, испытывающее бортовую качку по параметру (переменной) «угол крена», является типичной динамической системой: величина угла крена постоянно изменяется во времени, представляя собой нерегулярный колебательный процесс. Скуловые кили, являющиеся пассивным средством умерения качки, сами по себе как конструктив не обладают признаками динамичности. Однако их наличие вводит канал отрицательной обратной связи, противодействующий наклонам судна. При этом судно по данному параметру не перестает быть динамической системой, однако амплитуда бортовой качки уменьшается.
Таким образом, систему можно считать динамической, если она может принимать во времени множество состояний, отличимых друг от друга, причем эти состояния определяются по наиболее существенным для данной системы параметрам (переменным), применимым на соответствующем системном уровне. То есть определение «динамическая система» фактически является неформальным (не абсолютным, относительным).
Рассматривая управляемость ТС, необходимо учитывать «закон необходимого разнообразия»: только разнообразие возможностей регулятора (системы управления) может уменьшить действие на систему разнообразия возмущающих воздействий [9]. Соответственно, сложность системы управления и число каналов управления должны соответствовать числу меняющихся и требующих регулирования переменных, описывающих систему, то есть числу степеней свободы системы. Например, для рельсового транспорта подсистема движения имеет только одну степень свободы и управляется только по включению и выключению режима движения, а также по интенсивности этого режима (скорости движения). Транспорт, перемещающийся по плоскости (автомобиль, надводное судно и т.п.), имеет две степени свободы и по сравнению с рельсовым транспортом должен дополнительно иметь канал управления по направлению движения в плоскости (по курсу). Транспорт, перемещающийся в трехмерном пространстве (воздушный транспорт, подводная лодка и т.п.), имеет уже три степени свободы и по сравнению с плоскостным транспортом должен иметь еще канал управления перемещением по вертикали. Указанный «закон необходимого разнообразия» необходимо учитывать в первую очередь для обеспечения работоспособности ТС. Действует он и в процессе развития техники.
Как было отмечено выше, законы повышения степени динамичности и управляемости в основных системах ЗРТС рассматриваются «в связке». При этом, например, в [3] приоритетным законом считается закон увеличения степени управляемости, а закон повышения динамичности рассматривается главным образом как средство реализации упомянутого приоритетного закона. Однако в реальности приоритетность того или другого из рассматриваемых законов («что было раньше – курица или яйцо?») во многом зависит от конкретной фазы развития технической системы.
3 Законы повышения степени динамичности и управляемости ТС относят, как правило, к процессу развития (эволюции) технических систем [2], [3]. Однако для обеспечения работоспособности целый ряд ТС должны изначально иметь некоторые минимально необходимые (пороговые) уровни динамичности и управляемости, определяемые принципом действия и особенностями функционирования системы [6], [11].
Рассмотрим в качестве примера судовые движители [12]. Все движители, работающие в воде, обеспечивают тягу, создавая струю воды, направленную в сторону, противоположную направлению движения судна, и имеющую скорость, превышающую скорость перемещения судна. Большинство из применяемых в настоящее время движителей (весло, гребное колесо, гребной винт, водомет) основаны на принципе механического взаимодействия с водой и представляют собой конструкции, элементы которых постоянно меняют свое положение в пространстве (за счет циклического перемещения или вращения). То есть все эти судовые движители являются динамическими системами. При этом степень динамичности определяется исключительно необходимостью обеспечения работоспособности, то есть главной функцией и принципом действия.
Подобная картина наблюдается также в механических лагах, используемых для измерения скорости судна и содержащих «вертушку», вращаемую потоком воды, от которой результат вращения передается механически или электрически, через вращаемый электрогенератор, на измерительный циферблат [13]. Аналогично устроены и механические измерители расхода жидкости (расходомеры).
Динамизация конструкции с целью обеспечения работоспособности использована в гравитационном отбойном устройстве причального сооружения (рис. 2) [14]. В этой системе для восприятия значительных инерционных усилий при навале судна на причальное сооружение, которые не могут быть погашены только за счет деформации типовых резиновых амортизаторов, используется перемещение тяжелого блока, который под действием удара скользит по опорной круговой поверхности, поглощая энергию. После прекращения действия навала блок возвращается на место под действием силы тяжести.
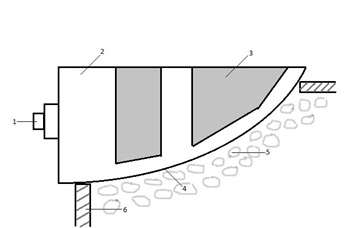
Рисунок 2 – Гравитационное отбойное устройство
1 - резиновый амортизатор; 2 – подвижный железобетонный блок; 3 – тяжелый сыпучий материал; 4 – круговая поверхность скольжения (соответствует углу внутреннего трения грунта 5, засыпанного в нишу причального сооружения 6)
Повышение динамичности системы в процессе развития также может быть связано с обеспечением работоспособности, например, с интенсификацией функционирования. В [15] было показано, что одним из условий успешного развития системы «самолет» на самом начальном этапе было создание авиационных роторных двигателей внутреннего сгорания. Причиной создания таких двигателей с вращающимся блоком цилиндров была необходимость обеспечения охлаждения цилиндров в условиях применения материала с малым коэффициентом теплопроводности (чугун) и небольшой скорости передвижения самолетов.
Подобное решение – придание вращения корпусу дирижабля – было использовано в проекте «Циклокрейн» фирмы «Аэролифт» (США) для обеспечения движения дирижабля и интенсификации процесса очистки гелия [16].
Повышение динамичности может быть использовано и для устранения нежелательных эффектов, мешающих функционированию системы. Для защиты морского буя, удерживаемого якорным канатом, от навалов судов по периметру корпуса буя, имеющего форму тела вращения, устанавливается кранец в виде резинового кольца. Такой кранец хорошо защищает при навалах, перпендикулярных кольцу. При ударе по касательной буй начинает вращаться и закручивает якорный канат, который после неоднократного повторения этой процедуры может оборваться. Для предотвращения этого эффекта кранцевое буферное кольцо выполнено вращающимся вокруг корпуса буя (опираясь, например, на шары, уложенные в соответствующий желоб) [17].
Еще один пример повышения динамичности для уменьшения нежелательного эффекта – морская спасательная капсула, стабилизированная с целью снижения амплитуд качки на волнении (рис. 3) [18]. Корпус спасательной капсулы выполнен из двух соосных пластмассовых сфер, зазор между которыми составляет 10-20 см и заполнен жидкостью (водой, смазкой, тяжелой жидкостью). При этом внутренняя сфера как бы плавает в этой жидкости, а внешняя сфера может вращаться относительно внутренней, положение которой стабилизировано за счет расположенного в нижней части балласта. За счет такого исполнения на внутреннюю сферу в меньшей степени передаются возмущающие воздействия морского волнения, что позволяет уменьшить интенсивность качки внутренней сферы и заметно облегчить физиологическое состояние находящихся в ней людей (поскольку в небольшом замкнутом объеме воздействие качки воспринимается особенно тяжело).
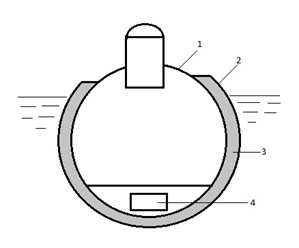
Рисунок 3 – Стабилизированная спасательная капсула
1 – внутренняя сфера; 2- внешняя сфера; 3 - междусферное пространство (заполнено жидкостью); 4 – балласт
Можно отметить, что данное техническое решение реализует в системе пассивный регулятор, уменьшающий воздействие внешних возмущений морского волнения.
Из приведенных выше примеров динамизма видно, что в случаях, когда повышение динамичности применяется для обеспечения работоспособности в рамках принятого принципа действия или интенсификации функционирования, а также для устранения нежелательного эффекта, опять же связанного с принципом действия, исходная причина динамизма не связана с необходимостью повышения управляемости ТС.
В тех случаях, когда динамичность системы обусловлена принципом действия, в процессе развития системы и смены принципа действия возможна реализация решений, которые можно трактовать как «антидинамизм». Например, в [15] было показано, что в процессе развития авиации роторные двигатели (с вращающимся блоком цилиндров) были заменены на двигатели с неподвижным блоком цилиндров. Это удалось реализовать за счет замены материала блока цилиндров с чугуна на алюминиевый сплав, что увеличило коэффициент теплопроводности в 3-4 раза, а также за счет увеличения скорости полета самолетов. В ходе развития судовых лагов и расходомеров механический принцип измерения скорости потока был заменен на индукционный. При этом в системе исчез вращающийся датчик скорости «вертушка», то есть подвижных (динамичных) элементов в системе стало меньше. Аналогичное изменение судовых движителей предполагается при реализации магнитогидродинамического (МГД) движителя [19]. Вместо вращающихся движителей используются неподвижные относительно друг друга и корпуса судна магнитные обмотки и электроды. То есть налицо «антидинамизм». Следует отметить, что при этом упрощения системы не происходит, поскольку сложность переходит на микроуровень (усложняется форма движения материи, используемая в системе). В то же время увеличения динамичности на микроуровне не наблюдается. Например, в МГД движителе в установившемся режиме движения электрическое напряжение на электродах и напряженность магнитного поля не меняют своих значений, как и число оборотов гребного винта в аналогичном режиме.
По поводу МГД движителя можно привести небольшой комментарий. Данное техническое решение является наглядным примером изобретения высокого уровня, считающегося перспективным, но не поддающегося реализации более 40 лет. Свою заявку на применение электромагнитного насоса в качестве судового движителя А.Г.Пресняков подал в 1955 году, но получил а.с. № 247064 только в 1969 году, после того, как в 1961 году на подобное изобретение был получен патент США № 2997013 В.Райсом и после того, как в США в 1966 году С. Вей успешно испытал модель с подобным движителем. Данный тип движителя активно исследовался в СССР и за рубежом в 60-70-е годы. В конце 70 – начале 80-х годов в СССР по этой теме было получено несколько авторских свидетельств. На сегодня имеется многочисленная литература по проектированию МГД движителей, включая учебную (смотри, например, [20]).
Обычно в прессе подробно освещаются работы по внедрению МГД движителя, проведенные в Японии (в пику России, не оценившей это изобретение соотечественника). Здесь в 1992 году было построено опытное судно Ямато-1 с таким движителем, причем для обеспечения необходимой напряженности магнитного поля были применены сверхпроводящие магниты с охлаждением жидким гелием. Однако при скромных размерах и достаточно большой общей мощности энергетической установки (дизель генераторов) около 4,5 МВт была получена скорость хода всего 8 узлов. При этом общий КПД системы движения составил около 4%. Причина в том, что морская вода является не таким хорошим проводником, как металл, и для получения достаточной тяги необходима большая напряженность магнитного поля. Достичь требуемую напряженность можно только с помощью сверхпроводимости, для обеспечения которой с использованием жидкого гелия требуются значительные энергозатраты. Поэтому перспектива МГД движителей тесно связано с технологией получения высокотемпературных сверхпроводников.
Между тем работы по реализации МГД движителя проводились в 70-80-е годы и в СССР. Главный эффект от такого движителя сначала усматривался в значительном повышении его КПД, поскольку отсутствовали потери от трения механического движителя о воду и на закручивание потока, создаваемого гребным винтом. Однако оценки энергетической эффективности установки, требующей использование жидкого гелия, показали бесперспективность этого направления в части экономии энергии. Оставался другой плюс МГД движителя – нечувствительность его акустических характеристик к неравномерности поля скоростей, создаваемого корпусом корабля. Был создан опытный полномасштабный образец такого движителя и проведены его испытания на плавучем стенде. Планировалось проведение натурных испытаний этого образца на одной из подводных лодок. Однако, оценив результаты испытаний на стенде, моряки здраво оценили его бесперспективность (из-за различных сопутствующих нежелательных эффектов, порождаемых принципом действия МГД установки) и работа еще в 80-е годы была закрыта.
4 Степень управляемости ТС, необходимая для обеспечения работоспособности, определяется упомянутым выше «законом необходимого разнообразия». Так, в процессе развития системы «самолет» [15] на работоспособных образцах присутствовали все средства управления, соответствующие степеням свободы движения самолета: управление скоростью полета, а также вертикальным и горизонтальным маневром. Кроме того, для обеспечения интенсификации маневра поворота в горизонтальной плоскости появились средства управления по крену: если самолет накренить внутрь циркуляции, то часть вектора подъемной силы крыльев работает как центростремительная сила, делая поворот круче. Для реализации требуемого управления на самолете были установлены динамичные элементы: вертикальные и горизонтальные рули и элероны. То есть в данном случае повышение степени динамичности системы явилось средством обеспечения повышения степени управляемости.
5 Если обратиться к процессу развития (эволюции) работоспособных ТС, то можно отметить, что подавляющее число случаев изменения степени динамичности и управляемости связано с реализацией принципа идеальности: в каждый момент времени и в каждой точке пространства в ТС должны быть только те свойства и взаимодействия, которые необходимы для получения полезного результата («ничего лишнего») [11]. Особенно наглядно это видно на примере развития одной системы в течение длительного времени (а не на примерах, взятых из разных систем), как это показано для процесса развития ТC «самолет» в [15]. По мере роста скорости самолета ряд свойств «лишних» для того или иного режима эксплуатации начинали порождать нежелательные эффекты, то есть приводили к обострению соответствующих технических противоречий (ТП). Шасси, на которые самолет должен опираться при нахождении на земле, при взлете и посадке, создавали дополнительное аэродинамическое сопротивление в полете. Такая же картина с кабиной: открытая кабина, каковой она должна быть при нахождении самолета на земле, также являлась источником дополнительного сопротивления. С другой стороны, профиль крыла, оптимизированный для полета и имеющий соответственно максимальное аэродинамическое качество, приводил к большому разбегу при взлете и большому пробегу при посадке, поскольку в этих режимах более выгодным было иметь профиль крыла с максимальной подъемной силой. Для разрешения этих противоречий пришлось изменить организацию системы во времени и сделать ряд элементов динамичными: убирающиеся и выпускаемые шасси, закрывающаяся и открывающаяся при необходимости кабина пилотов, а также механизация крыла (закрылки), обеспечивающая изменение эффективной кривизны профиля крыла. Естественно, для реализации требуемого повышения степени динамичности элементов системы пришлось создать соответствующие подсистемы. А поскольку появление новых динамичных элементов привело к увеличению числа переменных, требующих регулирования, для каждого из таких элементов был сформирован канал управления, что привело к повышению степени управляемости системы. То есть в рассмотренных случаях необходимость повышения степени динамичности явилась приоритетом для повышения степени управляемости.
Подобная картина наблюдается и в динамичных системах. Рассмотрим, к примеру, гребное колесо [12]. Исходный вариант этого движителя имел лопасти, закрепленные между двумя ободами, таким образом, что плоскость лопасти была расположена радиально относительно оси вращения колеса. При вращении колеса лопасти поочередно входили в воду, разгоняя ее и создавая струю, необходимую для создания тяги. При этом плоскость лопасти при вхождении в воду и выходе из нее составляла определенный угол с поверхностью воды. Соответственно это создавало дополнительное сопротивление вращению колеса и приводило к снижению КПД движителя. Данный нежелательный эффект можно было бы устранить, если бы плоскость лопасти на всем пути прохождения в воде занимало положение, перпендикулярное поверхности воды. Сначала этого пытались добиться за счет уменьшения кривизны траектории движения лопасти, то есть за счет увеличения диаметра гребного колеса. Но существенный рост габаритов колеса приводил к недопустимому увеличению его веса, а также к необходимости снижения частоты вращения колеса (чтобы абсолютная скорость движения лопасти в воде не была чрезмерной), что, в свою очередь, привело к необходимости использования малооборотных паровых машин и соответствующему дополнительному увеличению веса силовой установки. Разрешить это противоречия удалось, сделав лопасти поворотными, закрепив их на ободе не жестко, а на шарнирах. Для того, чтобы управлять положением лопасти (обеспечивая ее вертикальное положение при движении в воде), каждая из них крепилась также через шарниры к специальным тягам, соединенным с эксцентриком (см., например, рис. 4). То есть, необходимость обеспечения оптимального положения лопасти при движении в воде сначала привела к необходимости повысить степень динамичности лопасти, что, в свою очередь, потребовало повышения и степени управляемости.

Рисунок 4 – Гребное колесо с поворотными плицами
Не следует путать механизм действия законов повышения степени динамичности и управляемости на примере гребного колеса с механизмами действия этих законов для внешне похожего примера с гребным винтом регулируемого шага (ВРШ) [12]. Обычный винт фиксированного шага (ВФШ) представляет собой единую деталь, которая вращается целиком, приводимая во вращение гребным валом. Поскольку для судна необходимо управление скоростью хода, в случае применения ВФШ оно осуществляется путем изменения частоты вращения винта. При этом управление изменением оборотов производится за счет силовой установки (то есть канал управления локализован на двигателе или на трансмиссии). В тех случаях, когда силовая установка не может изменять обороты винта, управление тягой движителя и, соответственно, скоростью должно производиться за счет другого структурного звена энергоцепочки, в данном случае за счет самого гребного винта, на который переносится регулятор. При этом лопасти гребного винта выполняются поворотными относительно осей, закрепленных на ступице, воспринимающей момент от гребного вала (рис. 5). То есть вместо ВФШ приходится использовать ВРШ. В данном случае приоритетным требованием явилось повышение управляемости, реализация которого привела к необходимости повышения динамичности системы (гребного винта). Аналогом здесь могут служить руль судна или рули самолета.
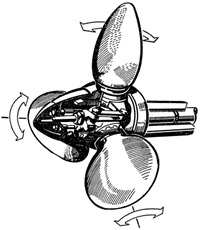
Рисунок 5 – Гребной винт регулируемого шага (ВРШ)
6 Разумеется, создание новых подсистем и каналов управления может привести к росту динамичности элементов в этих новых подсистемах. Однако такое наблюдается не всегда. Рассмотрим в качестве примера буксируемый подводный аппарат. Для обеспечения погружения аппарата вместе с буксирной линией на нем установлены крылья, создающие заглубляющую силу (направленную вниз). При этом размах крыльев получается такой, что поперечный габарит аппарата превышал продольный. Это затрудняло проведение операции спуска аппарата с буксирного судна, а также операции подъема не него. Было принято решение сделать часть крыльев складными. Для этого сначала предполагалось применить типовую подсистему поворота концов крыльев с помощью специального привода, управляемого экипажем аппарата. Однако в дальнейшем было найдено более простое решение (рис. 6, 7) [21].
На нижней поверхности поворотной части каждого крыла установили обтекаемый блок плавучести. На ходу заглубляющая сила крыла создавала момент, превышающий момент от силы плавучести, создаваемый этим блоком, и крыло раскладывалось. При остановке аппарата заглубляющая сила пропадала и момент от силы плавучести блока поворачивал концевую (динамичную) часть крыла, складывая его. Фактически канал управления наличествовал: управляющим сигналом был баланс моментов от сил, действующих на поворотную часть крыла. Но никакого дополнительного динамизма этот канал управления в систему не внес.
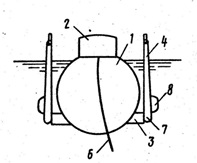
Рисунок 6 – Буксируемый подводный аппарат со сложенными крыльями (вид спереди)
1 – корпус аппарата; 2 – обтекатель входного люка; 3 – неповоротная часть крыла; 4 – поворотная часть крыла; 6 – буксирный трос-кабель; 7 – шарнир; 8 – блок плавучести
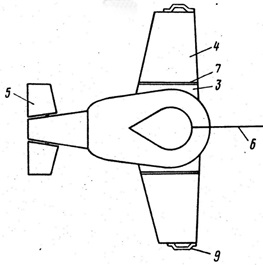
Рисунок 7 – Буксируемый подводный аппарат с разложенными крыльями
(вид сверху)
3 – неповоротная часть крыла; 4 – поворотная часть крыла; 5 – кормовые рули; 6 – буксирный трос-кабель; 7 – шарнир; 9 – концевая скоба
7 Следует отметить, что динамичность и управляемость системы скорее являются ее внутренними качествами, чем потребительскими свойствами. К потребительским свойствам безусловно относится удобство взаимодействия человека с ТС в процессе ее эксплуатации, включающее удобство управления. Для этих свойств динамичность и управляемость системы являются лишь средством реализации. Рассмотрим такой простой пример. Имеется зеркало, состоящее из трех частей (створок). Заказчик захотел, чтобы средняя часть была побольше. Соответственно, над ней закрепили дополнительную четвертую часть. Повышения динамичности и управляемости при этом не произошло. Но заказчик захотел, чтобы четвертая часть зеркала присутствовала не всегда, а только по мере необходимости. Пришлось эту четвертую часть сделать убирающейся (например, складывающейся относительно третьей части). Это привело к повышению степени динамичности и появилась еще одна характеристика системы, меняющаяся во времени (положение четвертой части). Для управления этой переменной должен был быть создан соответствующий канал. Сначала было решено, что перемещать эту четвертую часть будет сам пользователь. А для удобства взаимодействия с перемещающейся частью на ней была закреплена ручка. Данное решение привело не только к росту динамичности, но к росту управляемости, необходимость которого была обусловлена повышением степени динамичности. Но при этом рост управляемости, в свою очередь, к дополнительному росту динамичности не привел. Однако заказчик в дальнейшем захотел сделать так, чтобы четвертая часть зеркала становилась на место и убиралась путем нажатия какой-нибудь кнопки, то есть захотел повысить удобство управления. Чтобы удовлетворить требованию заказчика, пришлось создать специальную подсистему, которая включала в себя несколько меняющих свое состояние элементов. Это привело к одновременному росту степеней управляемости и динамичности.
8 На основании рассмотренных выше особенностей проявления законов повышения динамичности и управляемости ТС можно сделать следующие основные выводы:
- механизмы проявления законов повышения степени динамичности и управляемости и взаимосвязь между ними зависят от фазы развития ТС: создание с обеспечением работоспособности или эволюция;
- в тех случаях, когда повышение динамичности ТС обусловлено принципом действия (обеспечение работоспособности или повышение интенсивности функционирования) или связано с принципом действия (устранение соответствующего нежелательного эффекта), то повышение динамичности, как правило, не предполагает соответствующего повышения степени управляемости. В этих же случаях при смене принципа действия в процессе развития системы возможно снижение степени динамичности («антидинамизм»);
- обеспечение степени управляемости, необходимой для работоспособности ТС, должно соответствовать «закону необходимого разнообразия», то есть число каналов управления должно соответствовать числу изменяемых переменных, определяющих степени свободы системы. При этом реализация заданной степени управляемости требует соответствующего повышения степени динамичности системы;
- в процессе эволюции повышение степени динамичности обусловлено в основном реализацией принципа идеальности, в соответствии с которым в каждый момент времени и в каждой точке пространства в ТС должны быть только те свойства и взаимодействия, которые необходимы для получения полезного результата. Реализация этого принципа происходит в случае обострения соответствующего технического противоречия (противоречия системы) и приводит к изменению организации системы во времени, порождая необходимость повышения степени динамичности. Это, в свою очередь, приводит к соответствующему повышению степени управляемости, при реализации которой может быть дополнительно повышена степень динамичности (но не всегда);
- повышение динамичности и управляемости системы скорее являются ее внутренними качествами, чем потребительскими свойствами. К потребительским свойствам безусловно относится удобство взаимодействия человека с ТС в процессе ее эксплуатации, включающее удобство управления. Для этих свойств динамичность и управляемость являются лишь средством реализации.
Источники
1. Петров В.М. Законы развития систем. Серия статей. – Тель-Авив: 2002 -http://www.trizland/ru/tizba.php?id=108
2. Петров В.М. Теория решения изобретательских задач – ТРИЗ: учебник по дисциплине «Алгоритмы решения нестандартных задач». – М.: СОЛОН-Пресс, 2017
3. Любомирский А., Литвин С. Законы развития технических систем - GEN3 Partners, 2003 - http://www.metodolog.ru/00767/00767.html
4. Альтшуллер Г. Как работать над изобретением. О теории изобретательства. – Азбука рационализатора. – Тамбов, Кн. Изд-во, 1963
5. Альтшуллер Г.С. Творчество как точная наука. – М.: Советское радио, 1979
6. Голдовский Б.И. Система закономерностей построения и развития технических систем (1981-1983). – http://triz-summit.ru/ru/205253/203840/Gold/303251/
7. Петров В.М. Идеализация технических систем. – Областная научно-практическая конференция «Проблемы развития научно-технического творчества ИТР». Тезисы докладов. - Горький: 1983. С. 60-62.
8. Кондраков И.М. Динамизация технических систем. – Методология и методы технического творчества. Тезисы докладов и сообщений к научно-практической конференции 30 июня – 2 июля 1984 г. – Новосибирск: СО АН СССР, 1984. С. 70-72.
9. Эшби Р.У. Введение в кибернетику. Пер. с англ. – М.: Издательство иностранной литературы, 1959
10. Лернер А.Я. Начала кибернетики. – М.: Наука, 1967
11. Голдовский Б.И., Вайнерман М.И. Рациональное творчество – М.: «Речной транспорт», 1990
12. Лучанский И.А., Яновский А.А. От весла до водомета. – Л.: Судостроение, 1964
13. Корякин В.И., Хребтов А.А. От астролябии к навигационным комплексам. – СПб: Судостроение, 1994
14. Гравитационное отбойное устройство. Заявка Франции № 2581677 // РЖ ВИНИТИ «Водный транспорт». 1987. 10Б. С. 18-19 (10Б 119П)
15. Голдовский Б.И. Заметки к развитию технического средства «самолет» (2014) - http://www.metodolog.ru/node/1840-1841
16. Бойко Ю.С. Воздухоплавание в изобретениях. – М.: Транспорт, 1999
17. Кранцевая защита океанских плавучих конструкций. Заявка Японии № 60-174384 // РЖ ВИНИТИ «Водный транспорт». 1986. 10. С. 59 (10 А 477П)
18. Стабилизированная спасательная капсула. Заявка ФРГ № 3004823 // РЖ ВИНИТИ «Водный транспорт». 1982. 6. С. 7 (6 В 54П)
19. Нетрадиционные пропульсивные комплексы. // Катера и яхты. 1989, № 137
20. Емельянов Н.Ф. Судовые магнитогидродинамические движители: Уч. пос. – Владивосток: Дальрыбвтуз, 2000
21. Подводный буксируемый аппарат. Авт. свид. № 1559594, приоритет от 05.09.1988г., зарегистрировано 22.12.1989г.
Нижний Новгород, июнь 2017 г.
Комментарии
Re: О динамичности и управляемости технических систем
К сожалению ничего не сказано о динамизации, как о средстве реализации согласования/рассогласования (внешнего и внутреннего) системы.