Часть 1 http://www.metodolog.ru/node/832
Часть 2 http://www.metodolog.ru/node/843
Часть третья, окончание
В первой части статьи были сформулированы те методологические требования, которые следует предъявлять к описаниям сущностных особенностей технических объектов (следует их предъявлять для того, чтобы эти описания были продуктивны для разработчиков). И затем шел исторический обзор попыток исследователей дать сущностное описание технических объектов (шла характеристика-оценка таких попыток, исходя из сформулированных требований). Этот обзор в первой части ограничился характеристикой физических попыток таких описаний.
А во второй части продолжился обзор не тризовских подходов к описанию технических объектов, а также давалась общая характеристика особенностей тризовского подхода к таким описаниям. После этого началось обсуждение (трактовка-толкование) такой тризовской универсальной модели, описывающей устроение технических объектов, как «полная» ТС. Этот разговор сейчас будет продолжен.
***
5.1. О ТРАКТОВКЕ-ТОЛКОВАНИИ НАЗНАЧЕНИЯ И ОСОБЕННОСТЕЙ ФУНКЦИОНАЛЬНЫХ БЛОКОВ ИСПОЛНИТЕЛЬНОГО ЭТАЖА
Трактовку-толкование функциональных мест-блоков, представленных на блок-схеме полной ТС, я начну с обсуждения назначения и особенностей функциональных блоков исполнительного этажа. А назначение и особенности ОУ пообсуждаю попозже.
Собственно расхождений в понимании особенностей блоков (функциональных мест) исполнительного этажа у тризовцев немного (в отличие от ОУ), поэтому разговор здесь предстоит не очень сложный.
Начну с того функционального места, которое именуется, как источник энергии (ИЭ). По отношению к нему может возникнуть у разработчиков некоторая путаница, связанная с расплывчатостью-туманностью определения (физиками!) того, что такое энергия. Поэтому имеет смысл сразу уточнить, что под функцией именно этого места схемы (т.е. ИЭ) и применительно к нашей теме продуктивно понимать функцию «истечения» энергии того или иного вида.
Отсюда становится понятно, что для реализации (воплощения в составе вещи) этой функции у разработчика имеется такие две возможности:
· а) воспользоваться уже наличествующими на Земле потоками энергии, вещественными или полевыми (скажем, потоками воды, воздуха, излучением Солнца, теплом Земли, гравитационным полем Земли и т.п.),
· б) самому организовать такой поток (организовать искусственную генерацию-истечение энергии).
И потому имеет смысл в разнообразии известных и возможных ИЭ различать:
· так называемые потоковые технические источники энергии (потоковые ИЭ)
· и так называемые топливные технические источники энергии (топливные ИЭ).
Естественно, что для функционирования топливных ИЭ необходимо организовывать добычу-изготовление соответствующих топлив (дров, угля, керосина, урана 235 и т.п.), и потому приходится разрабатывать и изготавливать соответствующие виды технических устройств (виды ТС). К слову: а для анализа всех этих видов устройств тоже используется схема полной ТС.
Перейдем теперь к функциональному месту под именем двигатель (Дв). Здесь тоже буду краток и отмечу лишь следующее.
Первое. Куда продуктивнее это функциональное место обозначать более общо, а именно, как преобразователь потока энергии, ибо совсем необязательно в современном техническом устройстве преобразовывать сгенерированный поток энергии некоего вида именно в поток энергии механической (в так называемое механическое движение). Но дальше я, следуя тризовской привычке, буду пользоваться традиционным обозначением этого функционального места.
Второе. В анализируемой вещи-ТС может быть несколько последовательных превращений энергии, но это не должно нас смущать, все это – одно и тоже функциональное место.
Третье. В анализируемых вещах (ТС какого-то вида) могут иметься:
· и несколько разных источников энергии,
· и многократные преобразования потоков энергии.
Так вот, вопрос о том, какие именно из наличествующих (усматриваемых) превращений потоков энергии из одного вида в другой в анализируемом нами сорте вещи-ТС отнести к ИЭ, а какие к Дв, – вопрос не очень-то принципиальный. На мой взгляд, наиболее продуктивно руководствоваться (при разделении функций между этими функциональными топами ТС) следующим правилом:
· в Дввходят последние, так сказать, этапы превращения потоков энергии,
· тем самым, именно Дв выдает тот поток энергии некоего вида, который непосредственно используется в РО.
Что касается трансмиссии (Тр), то надо прямо сказать, что в исследованиях тризовцев застолбнено, в основном, лишь само это функциональное место. Иными словами, зафиксирована лишь сама необходимость такой функции в вещах – средствах Д. Что же касается того, что более конкретное под функцией с таким именем следует понимать, то здесь наработано немного. Но подробный разговор на эту тему в данной статье – невозможен, слишком о многом придется говорить, поэтому я затрону лишь далеко не все значимые моменты.
Первое. В принципе, здесь следовало бы, для начала, различить между собой такие понятия, как связь и трансмиссия. Но в это я углубляться не буду, а только укажу еще на то, что слегка (но только слегка) это различие можно охарактеризовать таким определением: «трансмиссия (Тр), это – тоже связь, только связь между пространственно отдаленными между собой частями-объектами и потому оформленная в виде некой специальной конструкции».
Второе. Если теперь дополнительно уточнить, что трансмиссия (такая функция), это – адресная передача чего-то (передача чего-то из места-адреса А в место-адрес Б), то становится понятно, что в каких-то конструктивных решениях трансмиссия нужна:
· и между ИЭ и Дв,
· и между Дв и РО,
· и между ОУ и блоками исполнительного этажа и т.д.
К слову, сказанное выше еще раз подчеркивает не конструктивную (так сказать, не натуралистическую) специфику схемы полной ТС.
Что еще можно добавить по поводу особенностей Тр?
Самый простой вид реализации Тр, это – твердый стержень заданной длины (например, древко лопаты). Но во многих видах вещей-ТС Тр – достаточно сложная ПС, включающая в себя:
· помимо собственно устройства направленной передачи чего-то
· еще и "согласующие концы" (т.е. приемо-передающие это что-то "концевики", управляемые и/или неуправляемые).
Более подробно над типологией и устроением более сложных Тр читатель может подумать и сам.
Наконец мы добежали до рабочего органа (РО) исполнительного этажа схемы полной ТС. Функция этого места, если говорить наиболее общо, это – перевести подходящий поток энергии в комплекс действий, необходимых и достаточных для выдачи вещью-ТС нужной нам полезной функции. Иными словами, РО – та «функциональная» часть (те организованности) ТС, которая непосредственно выполняет ГПФ (главную полезную функцию), причем выполняет:
· делая это с помощью подведенной Тр энергии подходящего(!) сорта
· и следуя управляющим воздействиям ОУ.
Еще напомню, что РО "выдает" продукт:
· либо в виде полностью готового к использованию и потреблению (в том числе, это: и какая-то часть вещи – средства Д., и какие-то сообщения на экране телевизора, а также: результат расчета или проект детали на выходном устройстве ЭВМ и т.п.),
· либо в виде полуфабриката, являющегося исходным материалом для следующего технологического звена.
Соответственно, РО:
· может осуществлять одно или несколько управляемых (управляемых: или конструктивно, или из ОУ) "действий" (операций) по отношению к поступающему материалу,
· может быть разного уровня сложности (т.е. содержать иерархию организующих и управляющих исполнительных устройств).
Об этом поговорю чуть поподробнее.
Первое. Комплекс действий может быть разного масштаба и характера.
Второе. Что касается масштаба, то это могут быть действия, производимые, скажем, ковшом огромного экскаватора, а могут они производиться и на молекулярно-атомном уровне. К слову, особенности действий РО на молекулярно-атомном уровне (скажем, в виде молекулы-катализатора) я подробно обсуждал в своей статье «Об идее самопревращения…»[1].
Третье. Что касается, так сказать, «характера» действий в РО, то их характер может быть самый разный: от действий физико-химического вида до действий информационно-вычислительных. Впрочем, дальше еще об этом пойдет речь.
Что еще можно добавить по поводу типологий и функционального устроения РО?
В сложном РО можно говорить о последовательности в нем действий над материалом. Иными словами, можно обсуждать:
· и принцип действия РО,
· и ту технологию, которая в РО реализована.
И еще. В сложно устроенном РО могут быть предусмотрены несколько ПС для тех или иных манипулипуляций над материалом ПС (в частности, по его транспортированию). Иными словами, операции транспортирования материала могут быть частично или полностью совмещены с операциями по его превращению. Пример тому: роторные технологические линии, химические реакторы и т.п.
В ТРИЗе основным инструментом анализа РО (его принципа действия, способа работы, механизма) является вепольный анализ.
Нам осталось пообсуждать еще такие функциональные места в области «исполнительного» этажа полной ТС, которые не часто указываются на схеме полной ТС. Я имею в виду такие там места, как материалы, продукты, а также побочные продукты.
Для начала напомню следующее.
Продукт, это – та самая полезность, которую ТС «выдает» наружу.
А под материалом (применительно к ТС) понимают то функциональное нечто, которое поступает в ТС извне и подвергается по ходу функционирования ТС «обработке» с целью превращения его в продукт. При этом особо напоминаю, что это «нечто» (т.е. материал) может быть:
· и веществом,
· и полем,
· и даже сообщением (порцией-единицей информации).
Все это зависит от той ГПФ, которая для ТС некоего вида нами задана.
А теперь обращаю внимание читателя на такие моменты.
Первое. На блок-схеме полной ТС такие функциональные места, как продукт и материала частично выведены за пунктирную линию, столбящую «границы» полной ТС. Это обозначает тот момент, что и продукт, и материал принадлежат (относятся) не только к данной ТС, но они в чем-то и автономны, имеют свои собственные отношения и взаимодействия с окружающим ТС миром.
Второе. В целом ряде видов вещей-ТС при анализе в них таких функциональных мест, как материал и продукт, обнаруживается много тонкостей-нюансов. Каких же?
Поясню это на ряде интересных для тризовцев-практиков примеров того:
· как именно в некоторых видах достаточно развитых ТС материал превращается в продукт.
· иными словами, как может функционировать исполнительный этаж, каков может быть его механизм и «принцип действия»,
а заодно этими примерами продемонстрируется и встречающееся в множестве развитых видов ТС разнообразие их РО.
Первый пример. В полной ТС такого вида, как топливный ИЭ, материал, поступающий в нее (это – вещество под именем «топливо») таков, что его «обработка» в РО такой ТС приводит к тому, что эта ТС выдает продукт в виде потока энергии(!) некоего вида. А побочным продуктом (отходом) здесь выступает некая «зола», оставшаяся, как результат обработки и превращений рабочего тела.
Второй пример. В полной ТС такого вида, как Дв, картина превращения материала в продукт совсем иная. Поступающим в ТС-Дв материалом выступает поток энергии (или конфигурация сил некоего вида). И этот самый не вещественный (полевой) материал в РО такой полной ТС преобразуется в не вещественный же продукт, а именно, преобразуется в поток энергии (или конфигурацию сил) другого вида. Это преобразование производится с помощью манипуляций (делаемых с его же(!), этого потока, помощью) над неким, так называемым рабочим телом, постоянно(!) входящим в состав этого РО (вспомним про так называемую тепловую машину).
К слову, я в этих примерах скороговоркой обрисовал очень сложные вещи, но иначе здесь я бы застрял надолго.
Теперь еще раз напомню, что функциональный анализ вещей такого сорта, как ИЭ, Дв (т.е. ТС с такой ГПФ) усложнен тем, что они обычно совмещают в себе еще целый ряд (и не один) функций, связанных:
· с добычей и подготовкой топлив, подготовкой рабочих тел,
· с цепочками преобразований энергии и т.д.
Впрочем, всякие нюансы есть и в анализе функционального устроения и полных (развитых) ТС других видов.
Так, если мы обратимся к анализу функционального устроения вещей-ТС такого вида, ГПФ которых есть какая-то оказываемая людям услуга, то обнаружим, опять же, относительно таких функциональных мест, как продукт и материал, а также относительно преобразования материала в продукт много специфических тонкостей. Не вдаваясь в подробности и достаточно сложные пояснения, сразу укажу, что эти тонкости проистекают:
· и из того, что в таком классе вещей-ТС есть много таких видов-сортов, которые выступают и как конечные продукты, и как средства Д.,
· и из того, что ядерным процессом РО (и всего исполнительного этажа!) ряда сортов таких ТС (скажем, того же компьютера) является не комплекс силовых действий, а переработка информации (конечно же, сопровождаемая и «вещественно-силовой» составляющей).
Впрочем, кое-что из этого станет понятнее после разговора про устроение ОУ полной ТС.
Мне осталось сказать пару слов относительно того функционального места исполнительного этажа, который именуется, как побочные продукты.
А зачем вообще указывать на схеме это функциональное место? Дело в том, что при функционировании любой вещи (да часто и при ее хранении), помимо запланированных нами полезностей (а их (т.е. ГПФ) может быть несколько), «выдаются» вещью (и/или ею выделяются) продукты побочные. Причем:
· лишь какой-то своей частью эти продукты нами, так сказать, ожидаемы (те же отходы производства),
· а есть и неожиданные.
Так вот, фиксация этого места на схеме полной ТС заставляет разработчика быть начеку, думать и над теми проблемами, которые с этим местом возможны.
Что можно еще сказать об этом функциональном месте? Поскольку подробный разговор об этом я вел в статье «о потребительских особенностях вещей», то здесь буду краток.
Побочные продукты по большей части – продукты вредные.
Побочные продукты – разнообразны, так что при анализе этого функционального места вводятся (в зависимости от целей и задач анализа) те или иные классификации этих продуктов (скажем, выделяют особо там такие, как «отходы производства» и т.п.).
Еще отмечу, что побочные продукты – не обязательно, так сказать, вещественные. Например, в состав побочных продуктов:
· может входить рассеянная часть входного потока энергии, или рассеянная часть преобразованной в Дв энергии,
· может входить и тепловая энергия,
· а может входить и какой-то информационный мусор.
Повторяю, здесь разработчику надо быть настороже, не упускать этот функциональный фактор ТС из поля своего внимания.
Итак, с функциональными местами исполнительного этажа разговор мы закончили, пора перейти к органу управления.
5.2. О ТРАКТОВКЕ-ТОЛКОВАНИИ НАЗНАЧЕННОСТИ-ОСОБЕННОСТЕЙ ОРГАНА УПРАВЛЕНИЯ И ФУНКЦИОНАЛЬНЫХ БЛОКОВ, В ЭТОТ ОРГАН ВХОДЯЩИХ
Здесь предстоит куда более сложный разговор, поскольку:
· если относительно функциональных мест исполнительного этажа у тризовцев: уже очень много чего наработано, к тому же, есть достаточно полное относительно наработанного взаимопонимание,
· то относительно органа управления (ОУ) – этого не скажешь.
Свидетельство тому – длящиеся споры относительно того, как рисовать схему функционально-структурного устроения ОУ.
Итак, начнем. Выше по тексту про ОУ было сказано, что назначение-функция органа управления-самоуправления вещи (ОУ) – воздействовать на так называемые исполнительные (силовые) части (органы, блоки) вещи таким образом, чтобы, несмотря на действие всех, перечисленных выше, «вводных» факторов, вещь все-таки продолжала выполнять заданные ей нами (разработчиками и пользователями) внешние функции.
Но теперь следует уточнить, что это определение назначения (функции) управления, как типа целесообразного процесса, есть определение усеченное и упрощенное. А такое усечение там было проделано для того, чтобы не загромождать разговор.
Упрощение было хотя бы в том, что поскольку всякие помехи и непродуманности имеют место и по отношению к частям самого ОУ, то, по большому счету, ОУ должен управлять и своими собственными функциональными местами. А, начиная думать про это (да еще про многое иное, что с этим связано), мы обнаруживаем много очень значимых обстоятельств, не учтенных тем самым определением.
Больше того, если мы вспомним про то системное требование, что описание каждого функционального места в полной ТС должно ухватывать его особенности в его (этого места) ужев ставшем-зрелом виде, то наша задача еще колоссально усложняется. Ведь в наиболее развитом виде управление (да и само самостоятельное целесообразное самодействие):
· представлено не в вещах – средствах Д.,
· а представлено в таких типах целесообразных объектов, как живые организмы,
· а среди живых организмов в наиболее развитом виде управление представлено у человека.
А где такие описания нам можно взять?
Вопрос этот – чисто риторический. А этим вопросом я хочу еще раз подчеркнуть тот момент, что очень усложняет предстоящий разговор:
· и то, что управление, как тип целесообразного процесса, ухватывается в предметных науках очень однобоко и потому – мало продуктивно,
· и то, что для того, чтобы обстоятельно об этом повести разговор с системных позиций, нужны не статьи, а толстые монографии, но таких монографий пока еще ни одним из издательств не издано.
К слову, здесь у меня перед многими читателями преимущество: я знаком с серьезными рукописями на эту тему (да и сам много над этим размышлял).
Вот и придется мне и в этом месте статьи поступить так же, как и раньше. Сначала буквально «на пальцах» я обрисую сущностные особенности управления, как типа процесса, а затем приведу схему такой функционально-структурной модели ОУ, которая бы эти его сущностные особенности ухватывало-описывало продуктивно и полно.
О СУЩНОСТНЫХ ОСОБЕННОСТЯХ УПРАВЛЕНИЯ: И КАК ТИПА ПРОЦЕССА И КАК ОРГАНИЗОВАННОСТИ, ЕГО ОСУЩЕСТВЛЯЮЩЕЙ (КАК ОУ)
Следуя указанным немного выше по тексту системно-методологическим требованиям (а именно: описывать функциональные места в их уже развитых (зрелых) состояниях), начну разговор с описания особенностей управления в живых организмах (именно там, а не в технике, эти процессы наиболее развиты).
В принципе, живые организмы – крайне неустойчивые образования (если их оценивать с позиций законов, царящих в косной природе). Тем не менее, они устойчиво-преемственно длятся (и даже порождают, по ходу видовой эволюции, все новые, более сложные свои виды), что, исходя из тех же законов, следует оценивать, как чудо.
Так вот, все это (т.е.: и преемственное дление живых объектов, и их эволюция-развитие) обеспечивается огромной иерархией таких целесообразных процессов, протекающих в живых организмах (так сказать, свойственных живой природе), сущностные особенности которых ухватываются такими типами-моделями процессов, которые обозначаются, как организация и управление. Иногда их объединяют в единый тип процессов под именем оргуправление (так их объединяют, потому что и тот, и тот вид описывается одной и той же функционально-структурной конфигурацией).
Можно сказать об этом же короче (но вряд ли понятней), а именно: с помощью таких категорий, как организация и управление (вкупе с категорией информация) ухватывается механика живого, механика целесообразности.
Сейчас сказанное попробую все-таки чуть пояснить, привязавшись к более традиционным описаниям человека. Но привязываться буду, описывая человека заведомо упрощенно, чтобы не слишком утяжелять разговор.
Чтобы человеку-индивиду жить, длить свою жизнь, ему необходимо активничать, а чтобы это активничание было успешным, необходимо соблюдение следующих условий.
Во-первых, необходимо иметь человеку-индивиду какой-то запас знаний (как о своем окружении, так и о своих возможностях).
Во-вторых, необходимо ему выстраивать планы своего активничания, планы последовательностей тех действий, которые приводят к нужной цели.
В-третьих, ему необходимо реализовывать эти планы, необходимо действовать.
В-четвертых, ему необходимо отслеживать то, какие изменения происходят в окружении (в том числе, происходят и за счет совершения им своих действий), сверяя происходящие изменения со своими планами.
Наконец, в-пятых, необходимо вносить коррекцию в свои планы (и, соответственно, в намеченные до того действия), делая это в зависимости:
· и от характера отслеживаемых изменений,
· и от изменений в поставленных ранее целях (что тоже у человека бывает).
Еще напоминаю, что для обеспечения своего внешнего активничания, в самом организме человека должно осуществляться очень иерархизированное (и «матрешечное») многообразие процессов внутреннего оргуправления, благодаря которым человеку удается:
· и составлять планы (а также их корректировать),
· и отслеживать (органами чувств) происходящие изменения,
· и собственно совершать те самые действия.
И я повторно напоминаю, что пример с управлением у человека нарочно мной примитизирован, так что прошу не придираться.
Если теперь все сказанное сейчас предельно обобщить, подставив:
· вместо человека просто некий источник оргуправленческой активности (ИОА),
· а вместо окружения – адресат оргуправленческой активности (АОА),
то сказанное выше можно описать схематически-графически (смотри рис.3).
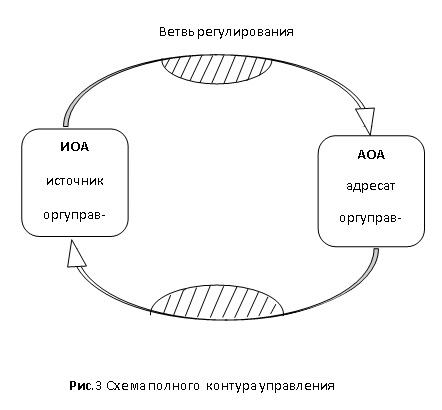
РИС. 3
Немного этот схематический рисунок поясню.
Процесс оргуправления на этом рисунке представляется в виде двух управленческих процессуальных составляющих (на рисунке, это – дуговые линии со стрелками), связывающих между собой две следующие отдельности:
· управителя, т.е. это: источник оргуправленческой активности (ИОА), некое устройство, принимающее решения,
· и управляемого, т.е. это: управляемая часть, адресат оргуправленческой активности (АОА).
Эти процессуальные составляющие, вместе со своими управленческими «полюсами-полярностями» (а именно, вместе: с ИОА и с АОА), образуют то, что именуется, как замкнутый контур управления.
Из этих дуг «прямая» процессуальная составляющая (т.е. дуга ИОА®АОА), это – фаза (дуга, ветвь) регулирования, она (вкупе с ИОА) включает в себя следующие составляющие (звенья) управления:
· процесс принятия решения,
· оформление решения в виде последовательности команд, а также их выдача для исполнения,
· исполнение решения (т.е. воплощение команд в виде действий, изменяющих (корректирующих) АОА.
Обратная процессуальная составляющая (т.е. дуга АОА®ИОА), это – фаза (дуга, ветвь) контроля (сигнализации), она (вместе с ИОА) включает в себя следующие составляющие (звенья) процесса управления:
· отображение (сенсирование и фиксация) изменений режима, происходящих в АОА (в том числе, и тех, которые произошли за счет уже до того проведенной управленческой коррекции)
· выработка сигналов (суммарной “картинки” изменений)
· учет сигналов в принятии решения.
Пояснение мое – пояснение очень сжатое, почти каждое в нем слово требует пространного разъяснения в виду отсутствия в известной литературе подобных описаний. Поскольку это бы непомерно раздуло объем статьи, то обращаю еще раз особое внимание читателя только на следующие особенности приведенного сейчас описания-определения процесса управления.
Первый. В процессах, относимых к управлению (точнее, к оргуправлению), ведущую (ядерную) роль играют информационные процессы (отсутствующие в объектах косной природы). Это, к примеру:
· и выработка сигналов и их доставка,
· и принятие решения,
· и оформление решения в виде команд (с их доставкой и исполнением).
Второй. При выработке сигналов основную роль играют такие типы-виды целесообразных процессов (тоже отсутствующие в косной природе!), как:
· отображение чего-то
· и сравнение отображенного чего-то с чем-то.
Причем, отображение, это (я это особо подчеркиваю!):
· вовсе не такой физический процесс, как так называемое отражение (а такую ошибку очень многие совершают, вспомним ленинский закон отражения),
· а куда более сложный процесс.
Больше того, во многих разновидностях отображения это самое отражение (такой физический процесс) совсем не участвует.
***
ЗАМЕЧАНИЕ
Все же сделаю еще два замечания.
Прежде всего, следует отметить, что указанная сейчас очередность процессов регулирования и контроля (прямой, обратный) – условна. В принципе, оргуправление, как процесс (как череда изменений, течение), состоит из последовательности повторяющихся одинаковых эпизодов (повторяющихся актов-циклов). Одинаковы эти эпизоды потому, что в состав каждого такого эпизода входит: и акт контроля, и акт регулирования. Можно еще добавить, что:
· при организации (построении) чего-то мы сначала воздействуем на что-то (его изменяем), а потом смотрим, что получилось,
· а при управлении чем-то, наоборот: сначала замечаем изменение и затем его корректируем в нужную сторону.
И второе. Кто-то может воскликнуть: да эта же схема – схема обратной связи! И это будет огромным заблуждением. Сейчас ошибочность этого восклицания немного объясню.
Начну с того, что под термином «обратная связь» в литературе нагромождено очень много взаимоисключающих смыслов. Почему? Сначала с его помощью объясняли такую усеченную (точнее «свернутую») разновидность управления, как авторегулирование (а так это получилось потому, что самоуправление в вещах с этого (т.е. с авторегулирования) и начиналось). А потом и все новые и все более развитые виды управления продолжали по привычке объяснять через обратную связь, вот и пошло нагромождение в этом понятии противоречивых смыслов.
Чтобы теперь подробнее разъяснить, как видятся с системных позиций:
· особенности и разнообразие авторегулирования,
· а также место там так называемой обратной связи, –
понадобится слишком много места. Поэтому я попробую обойтись следующим кратким разъяснением:
· в оргуправлении ядрную роль играют процессы информационные,
· в авторегулировании информационная часть процесса управления – не явлена, она воплощена в виде специальных вещных конструктивов, входящих в общую конструкцию вещи (вспомним, скажем, регулятор Уатта),
· а схема обратной связи, в принципе, – есть описание одной из разновидностей авторегулирования.
***
После такого обобщенного рассмотрения сущностных особенностей процессов управления и организации следовало бы перейти к более конкретному описанию этих процессов и тех организованностей, которые это реализуют, делая это на примере человека и социума, поскольку там все это представлено в наиболее «зрелом» виде. Но и это – тема огромная и отдельная.
А я (поскольку все-таки имею об этой зрелой форме кой-какие системные представления) сразу обращаюсь к специфике управления применительно к вещам – средствам Д. (конечно, опираясь при этом на уже сказанное про особенности управления). И прошу читателей обратить внимание на такие, общие для всех сортов вещей (всех видов ТС), моменты.
Как мы помним, управление вещами не целиком "размещается" в самой вещи (ТС), оно состоит:
· как из внешней,
· так и из внутренней,
своих компонент. А если вспомнить про такие потребительские характеристики вещи-ТС, как функциональность, управляемость, автоматичность, то следует отметить:
· что только всем управлением (т.е.: и внешним, и внутренним, да еще в купе с исполнительным этажом) обеспечивается требуемый уровень и ассортимент функциональности вещи (т.е. обеспечивается собственно осуществление ею своей ГПФ),
· а вот внутренние контуры управления (т.е. самоуправление), помимо участия в обеспечении функциональности, обеспечивают еще и автоматичность-самость осуществления ГПФ.
Теперь пойдем дальше. Внешняя компонента управления исходит из НС данной ТС (а в качестве НС может выступить и "деятельный" человек). И я напоминаю, что по отношению к внешнему управлению данная ТС выступает, как АОА (как адресат внешнего оргуправления). Причем, как мы помним, по мере развития того или иного вида Д. доля внешнего управления по отношению к технической составляющей единиц Д. этого вида – уменьшается, а доля самоуправления – увеличивается. Но(!) даже в самой развитой ТС некоторая доля управления (внешнего) остается за человеком, точнее, за НС этой ТС. Обо всем этом подробнее шла речь в моей статье о категории Д.
Теперь о внутреннем управлении (о самоуправлении). Если обратиться к практике разработок, точнее, к Д. разработчика, то мы видим, что величина доли внутреннего управления в разрабатываемой ТС определяется разработчиком, исходя:
· из имеющихся у разработчика в данный момент (именно при разработке данной ТС) ресурсов,
· а также из тех экономических и технических возможностей реализации и использования разработанного изделия, которые в социуме известны.
Т.е. эта доля в воплощенных ТС – переменчива.
И еще одно важное замечание общего характера, касающееся особенностей самоуправления применительно к модели полной ТС (тем самым, и применительно к особенностям самоуправления вещей – средств Д.). То функциональное место, которое обозначается на рисунке, как АОА, включает в свой состав (в самом общем об АОА понимании):
· и функциональные блоки исполнительного этажа,
· и функциональные блоки управленческих этажей,
· и какие-то составляющие окружения ТС.
Итак, сказанным сейчас: и про управление, и про возможный объем внутреннего управления, я охарактеризовал (пусть и очень-очень бегло):
· и особенности управления,
· и функции ОУ
полной ТС. Так что пора перейти к более конкретному описанию функционального устроения того функционального места в схеме полной ТС, который обозначается, как ОУ.
Но до того еще раз напомню, что задачами (назначением, внешней функцией) ОУ (вкупе с внешним управлением) являются:
· а) обеспечение стабильности заданного режима функционирования ТС (режима, постоянно сбиваемого "гулянием" воздействующих на функциональные места ТС внешних и внутренних факторов);
· б) обеспечение смены одного режима другим и/или обеспечение некой последовательности режимов;
· в) согласование, координация, соорганизация режимов функционирования ПС и Э этой ТС.
К слову: в развитых сортах вещей (т.е. в развитых вариантах полной ТС) та часть управления, которая направлена на обеспечение стабильности функционирования, часто формулируется, как: "обеспечение гомеостатирования".
И еще к слову. А в «сильно-сильно» развитой ТС могут быть предусмотрены:
· и возможность саморемонта,
· и даже возможность самоусложнения-саморазвития,
для чего в состав ОУ и в состав исполнительного этажа следует разработчику включать функциональные части, реализующие требуемые для этого функции.
Можно сейчас сказанное еще дополнять и дополнять, но на этом общее введение в специфику: и управления, как типа процесса, и ОУ полной ТС, – я обрываю и перехожу к конкретике, к функционально-структурному устроению ОУ (заодно, и к тем процессам-составляющим, конфигурация которых и образует процесс оргуправления).
Функционально-структурная схема ОУ (такого функционального места полной ТС) представлена на рисунке 4. И я напоминаю, что ее, как и всю схему полной ТС, не следует понимать натуралистически (не следует ее понимать, как схему конструктивного исполнения ОУ). Это – схематическое описание той совокупности функциональных мест, наличие которых в вещах-ТС необходимо и минимально достаточно для реализации-осуществления самоуправления этих вещей-ТС (причем, вещей-ТС любой(!) сложности).
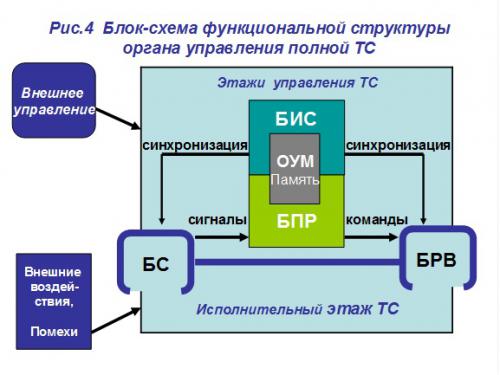
Сначала расшифрую приведенные на схеме рис. 4 обозначения, заодно дав очень краткую характеристику каждому из там указанных функциональных мест.
ОРГУПРАВЛЯЮЩАЯ МОДЕЛЬ (ОУМ) ОУ, это – совокупность единиц знаниевой информации. Она, эта совокупность, представляет собой инструкцию-программу управления данной ТС (с наличием в ней соответствующих банков знаний), сидящую в таком функциональном месте БПР, как память (впрочем, такое функциональное место, как память, необходимо и для БС, и даже для БИС и БРВ.
БЛОК СИГНАЛИЗАЦИИ (БС) или блок выработки «сигналов», это – блок "отображения" происходящих изменений и их "сравнения" с образцами (с описанными в ОУМ типами изменений). Т.е. это – блок выработки сообщений-сигналов о текущих параметрах состояния (сведений об изменениях состояния), причем:
· как состояния самой ТС (уже как объекта управления, АОА),
· так и состояния окружающей ее среды.
БЛОК ПРИНЯТИЯ РЕШЕНИЯ (БПР). Этот блок с помощью ОУМ, БС и БИС принимает решения и выдает набор команд, т.е. выдает описания:
· и последовательности управляющих воздействий,
· и их уровня-интенсивности,
причем, выдает все это (конечно, при наличии своей, т.е. БПР, функциональной полноты!) по отношению ко всем функциональным местам-блокам.
БЛОК РЕГУЛИРУЮЩИХ ВОЗДЕЙСТВИЙ (БРВ), он же: блок исполнительных инструментов управления, блок собственно регуляторов. Это функциональное место (БРВ) служит для текущей коррекции процессов, происходящих на управленческом и "исполнительном" этажах, следуя при такой коррекции поступающим из БПР командам. Для этого в самом БРВ происходит преобразование поступающих к нему команд, причем, преобразование многоэтажное:
· начиная с преобразований с более высокого на более низкий информационный уровень,
· и кончая преобразованием с информационного на уровень вещественно-энергетический.
Анализировать все это крайне интересно, но в данной статье этого делать я не буду.
БЛОК ПРОЦЕССОВ ИНИЦИИРОВАНИЯ И СИНХРОНИЗАЦИИ (БИС), который выдает запреты и разрешения:
· на выработку сигналов,
· на выдачу команд,
· на выдачу регулирующих воздействий
во всех управленческих контурах, причем, выдает запреты и разрешения в последовательности, заложенной в ОУМ и в конструктивных особенностях БПР и БРВ.
***
Я не буду здесь и сейчас специально доказывать то, что перечисленный сейчас набор-список функциональных мест ОУ необходим и достаточен. Это доказательство (пусть и в очень конспективном виде) уже приведено выше по тексту, при рассказе про сущностные особенности процессов организации и управления.
Только еще раз напомню, что ядерную роль в оргуправлении играют информационные процессы, отсутствующие в косной природе.
***
Теперь нам следует поговорить чуть подробнее про каждое из функциональных мест-блоков ОУ.
ОРГУПРАВЛЯЮЩАЯ МОДЕЛЬ (ОУМ)
ОУМ представляет собой совокупность единиц знаниевой информации, содержащую полный набор планов и манипуляций, необходимых для выработки требуемых по ситуации управленческих решений. ОУМ зафиксирована в памяти ОУ полной ТС[2]. Такие функциональные места, как ОУМ (и память, где она сидит), часто разработчиком разделяется на части и им включается в состав нескольких функциональных мест ОУ. Но в большей своей части разработчик размещает их в состав БПР.
ОУМ (в развитом своем виде) – сложное по своей семантике (да и по своей семиотике) информационное образование. В частности, в ее состав включены:
· модель реакций данной ТС на то или иное управляющее воздействие;
· набор управленческих решений на переход ТС в нужный режим из любого (разработчиком предусмотренного) другого режима, иными словами, это – алгоритмы перехода из режима в режим, наборы последовательностей команд.
Можно еще очень долго на эти темы распространяться, но я ограничусь лишь короткими здесь замечаниями.
Прежде всего, обращаю внимание читателей на то, что ОУМ не следует путать с тем понятием, которое известно в литературе по управлению под именем "МОУ" (модель объекта управления). МОУ, как термин и понятие, больше всего соответствует той части ОУМ, которую я чуть выше обозначил как "модель реакций..." (т.е. соответствует описанию совокупности реакций ТС на типовые воздействия). При этом понятно, что при наличии в ОУ некой ТС только ОУМ, взятой в объеме МОУ:
· управление этой ТС будет обречено на импровизацию управленческих решений[3]
· и потому может осуществляться только через внешнее управление этой ТС, идущее от НС[4].
Именно поэтому я использую применительно к структуре оргуправления только понятие и термин "ОУМ" (применительно к ТС это даже скорее УМ – управляющая модель)[5].
Еще немного поясню особенности ОУМ (УМ). Чем развитей организация ТС и чем сложней в ТС управление, тем больше факторов включается в семантику ОУМ этой ТС. Так, в ОУМ, в общем случае, должны быть учтены, не только факторы "по статике" ТС, важные для управления, но также должны быть включены:
· и динамические характеристики ТС,
· и ее реакции на типовые управленческие воздействия,
· и "ретроспектива" (прошлые воздействия, оставившие свой "след"),
· и реакции на изменения состояния окружающей среды и т.д.[6]
В целом же, разработчик использует для построения ОУМ намного больше десятка(!) разного рода знаний[7].
Еще напомню, что многие вопросы, связанные:
· и с оптимизацией управления, реализованного в варианте авторегулирования,
· и с устойчивостью тех или иных вариантов авторегулирования, и т.п., –
исследуются различными предметными науками, в частности, исследуются: в различных математизированных теориях управления, в технической кибернетике и др. Но об этом читатель может сам почитать, так что я на них здесь не останавливаюсь.
БЛОК СИГНАЛИЗАЦИИ
БС, т.е. блок выработки информации, т.е. блок выработки сведений-знаний об изменениях: и окружения, и частей ТС. Сразу оговорюсь, что такие сведения в БС формируются лишь в том объеме и ассортименте, который запроектирован разработчиком. Если говорить о функциональном устроении БС, то БС в полном своем функциональном виде содержит следующие "подблоки"[8]:
· приемники (датчики) изменений, иначе "сенсоры";
· оценщики изменений, вырабатывающие сообщения об особенностях произошедшего изменения, т.е. вырабатывающие различные сигналы;
· кодировщики (преобразователи) сигналов-сообщений в удобный для БПР вид;
· линии связи между подблоками БС, а также с другими функциональными блоками.
Подробнее я на этом функциональном месте не останавливаюсь. Хотя здесь следовало бы много о чем рассказать (из того, что усмотрено методологами). Скажем, рассказать о принципе работы сенсоров и т.д.
БЛОК ПРИНЯТИЯ РЕШЕНИЙ (БПР)
О блоке принятия решений тоже поговорю очень тезисно, отмечая лишь значимые для анализа системные здесь опоры-маячки (ибо разговор о нем – тоже очень-очень многотемный).
Сначала немного его охарактеризую в общем плане. Структура и сложность функционирования БПР зависит:
· от сложности функционирования самой ТС,
· от характера ГПФ, выполняемой данным видом ТС
· и от доли самоуправления, в ТС данного вида заложенной.
Кроме того, принятие того или иного управленческого решения во многих уже воплощенных ТС – часто процесс не одноступенчатый, обычно существуют несколько уровней управления, соподчиненных друг другу (целая их иерархия), иными словами, существуют иерархически устроенные уровни принятия оргуправленческого решения (уровни выработки “команд” управления)[9].
***
К слову, в известной литературе, когда хотят охарактеризовать-оценить уровень сложности принятия решений в том или ином ОУ, часто прибегают к такой метафоре: уровень "интеллектуальности" этого ОУ.
***
Что касается особенностей функциональной структуры БПР, то можно сразу указать, что его полная функциональная структура (на этаже-ранге "центрального контура управления" полной ТС) во многом совпадает с функциональной структурой такого, самостоятельно существующего типа-вида воплощенной ТС, которую я здесь обозначу, как ВЫЧИСЛИТЕЛЬ ("вычислительная машина").
Но о структуре собственно "вычислителя" я не буду останавливаться. Не буду:
· и потому, что с функциональной структурой вычислителей все читатели более или менее знакомы,
· и потому, что и так разговор о схеме полной ТС сильно затянулся.
Но все же еще отмечу, что описание с позиций системного подхода и такого, широко известного типа ТС, как вычислитель, значимо отличается (в сторону большей его продуктивности) от традиционных его описаний.
БЛОК РЕГУЛИРУЮЩИХ ВОЗДЕЙСТВИЙ (БРВ)
Что касается БРВ, то его конечная задача-функция – опредметить, материализовать управленческое решение, в частности, преобразовать информационную команду в вещественно-энергетическое силовое воздействие, подаваемое на вход той или иной ПС полной ТС.
Напоминаю, что эти управляющие воздействия могут быть направлены:
· как на любой (или некоторый) из функциональных блоков исполнительного ("нижнего") этажа ТС,
· так и на функциональные места самого ОУ (на каждую из его ПС).
Причем, особенность любого управляющего (подчеркиваю: управляющего!) воздействия-усилия заключается в том, что энергетические затраты на его осуществление заметно меньше величин энергетических потоков, которые он «регулирует». В этом – преимущественно вводимого разработчиком управления. А если это ему не осуществить удается, то лучше ему организовать другую ТС, параллельно действующую и решающую встающие задачи.
Что еще? Конечно же, БРВ может быть конструктивно реализован в разнообразных вариантах. И все это многообразие (и известное, и только замышляемое) можно разбивать (для продуктивного их анализа) на различные классы "регуляторов". Но подробнее об этом я здесь не веду разговор.
БЛОК ПРОЦЕССОВ ИНИЦИИРОВАНИЯ И СИНХРОНИЗАЦИИ (БИС)
Функционирование БИС сводится к выработке команд "разрешения" и "запрета" на совершение очередного оргуправляющего и/или силового (это – уже в исполнительных блоках) действия. Причем выработка таких команд в функционально полном БИСе производится:
· а) по отношению к совершению любого действия в каждом из подпроцессов оргуправленческого цикла,
· б) и обязательно в требуемые (по ОУМ!) временные моменты.
Выданные команды разрешения и запрета затем реализуются соответствующими исполнительными устройствами.
Этот блок имеет огромное значение для реализации управления (для его эффективности и вообще для обеспечения целесообразности самодействия), но ему обычно, к великому сожалению, не уделяется (в виду: то ли его очевидности, то ли еще чего) большого внимания в методологических исследованиях. А совершенно напрасно. Ведь именно на основе методологического анализа именно процессов инициирования и синхронизации удается начать продуктивно разбираться:
· с такой категорией самого общего плана (с которой никак не разберутся исследователи, традиционно мыслящие), как время,
· а также со многими другими проблемами мировоззренческого масштаба.
Но не буду во все это углубляться. Только отмечу еще следующее. Выработка команд разрешения и запрета может осуществляться не одним, а двумя стратегическими типами конструктивных решений.
Первый путь (тип стратегий), это:
· включение в оргуправленческий цикл специального, независимого от функционирования ТС, процесса, представляющего собой генерирование так называемых тактовых импульсов,
· и привязка в ОУМ команд запретов и разрешений к выдаваемым тактовым импульсам.
Но особо напоминаю, что и при наличии тактового генератора и счетного к нему устройства (т.е. при наличии в ОУ часов) необходимо еще производить:
· опознание производимого действия
· и сверку по ОУМ его очередности,
для чего должны быть соответствующие операторы и их отображения в ОУМ.
Второй путь – выдача требуемых запретов и разрешений самим целесообразно производимым действием (скажем, в момент своего "начала" или "окончания"). В этом, менее гибком, но более простом по исполнению, пути-способе, каждое действие несет в себе:
· помимо исполнительской (изменяющей или корректирующей) составляющей,
· еще и синхро-инициирующую компоненту.
Конечно, и для реализации этого пути необходимы соответствующие операторы (исполнительные устройства). Еще добавлю, что временная продолжительность управленческого цикла при втором пути синхронизации может быть достаточно вариабельной (по отношению к "внешним" часам).
Еще отмечу, что первый путь – более универсален, используя его, можно разработчику легко перестраивать последовательность запретов и разрешений в случае изменения ОУМ, в этом его, этого пути, преимущество.
На этом разговор про БИС, да и про другие подробности функционального устроения ОУ полной ТС я обрываю.
ЕЩЕ РАЗ ПРО УНИВЕРСАЛЬНОСТЬ БЛОК-СХЕМЫ ПОЛНОЙ ТС
Выше я упоминал, что блок-схема «полной ТС» настолько универсальна, что ухватывает собой, так сказать, механику целесообразности, и потому может использоваться и в каких-то ситуациях анализа, направленного на исследование:
· даже сущностных особенностей устроения живого организма любого вида,
· в том числе, и сущностных особенностей устроения человека(!).
Там же я оговаривался, что при этом требуется соответствующее задаче анализа развертывание смыслового содержания каждого из функциональных блоков, представленных на схеме полной ТС.
А здесь, для закрепления всего сказанного о модели «полная» ТС, эту универсальность все же хочу продемонстрировать на примерах из области живой природы. Только напомню, что в качестве АОА здесь, у живых организмов, служат:
· и свои исполнительные органы,
· и окружающая среда,
впрочем, у роботов – тоже самое.
Итак, возьмем в качестве примера всадника, на скаку берущего какое-то препятствие. С позиции традиционного исследователя это выглядит, как чудо. Как это так, всего несколько фотонов, уловленных всадником и лошадью от препятствия, развивают лавину процессов, приводящих к прыжку через препятствие! С помощью нашей модели все это описывается очень логично. У всадника и у лошади наличествуют ОУМ, в которых зафиксированы описания тех последовательностей действий, которые необходимы для преодоления препятствия. И все это отрепетировано всадником и конем и между ними согласовано. И когда сигнализаторы сообщают сигнал о препятствии, БПР человека и лошади выдают необходимые последовательности команд, а исполнительные органы коня и всадника их выполняют.
В качестве второго примера возьмем пример, недавно на сайте Методолог бурно обсуждавшийся. А именно, как это так, стая птиц вся вдруг совершает согласованный маневр. Исходя из модели, тоже все объясняется логично. У каждой из птиц есть приобретенная во время взросления поведенческая ОУМ, фиксирующая, что и как надо делать при групповом полете. Сигнализаторы (глаза) выдают сигнал о начале маневра (это начало может отслеживаться (глазами) по лидеру стаи, по впереди летящему и т.п., сейчас это не принципиально), и БПР выдает необходимые последовательности команд на исполнительные органы.
Конечно, все мной объясняется здесь «на пальцах», а для описания всерьез здесь очень много чего надо рассматривать (недаром я говорил еще в первой части про толстые книжные тома, это объясняющие). Тем не менее, и такая модель многое об особенностях живого объясняет.
6. ЗАКЛЮЧЕНИЕ
Мне думается, что по ходу статьи, несмотря на очень конспективное рассмотрение многочисленных и очень сложных вопросов, в ней затрагиваемых, все же произошло определенное углубление понимания особенностей тризовского подхода к описанию устроения технических объектов. И, еще думается, что читатель, усвоив рассказанное, расширит и обогатит свое системное видение, вооружится рядом новых системных инструментов. Они ему пригодятся:
· и для прогнозирования,
· и для проектирования,
· и для разрешения возникающих при разработке проблем.
Заодно внимательный читатель (т.е. читатель вдумчивый, читающий статью не спеша, что-то даже по нескольку раз перечитывая) сможет увидеть, несмотря на беглость разговора:
· и целый ряд новых теоретических результатов,
· и целый ряд новых теоретических проблем,
тем самым, сможет увидеть целый ряд узловых точек тризовских перспектив, точек-узлов роста-развития ТРИЗа (этой методологической теории). Но хочу особо подчеркнуть, что само собой это развитие – не пойдет. Здесь нужна специально организованная и воспроизводящаяся в поколениях людей сфера Д.
Попутно хочу еще раз обратить внимание читателей на следующий очень важный момент, в статье особо подчеркнутый, но не очень-то, к сожалению, среди тризовцев популярный. Он такой. ТРИЗ, как теория творения-творчества, состоит из двух (увязанных между собой разнообразными смыслами) составляющих:
· одна из них направлена на описание-исследование сущностных особенностей собственно творения, и шире – особенностей творца, и еще шире, на описание-исследование сущностных особенностей человека, как особого вида живых организмов;
· другая – на описание-исследование сущностных особенностей творимого творцом (обратите внимание: исследование сущностных особенностей всего-всего нами творимого, не только вещей!).
И еще. Ряд вопросов, тоже относящихся к теме статьи, рассматривать я не стал, чтобы не очень уж ее перегрузить. Среди таких вопросов хочу особо отметить такой.
Как известно, все модели, это – лишь наши мыслительные инструменты, а не реалии нашего технического окружения. Но все они нам помогают:
· и творить эти самые реалии,
· и разбираться с теми или иными аспектами нами сотворенного.
Что касается анализа сущностных особенностей вещей – средств Д., то для этого уже разработаны два тризовских инструмента, две универсальные модели: веполь и полная ТС. (Можно еще упомянуть и так называемый классификатор рангов ТС).
Так вот, один из не затронутых мной вопросов, это – вопрос о том, достаточно ли этих двух тризовских инструментов для ухватывания всех сущностных сторон устроения современного (тем более будущего) мира таких вещей? И если в этот вопрос вдуматься, то приходим к тому выводу, что нужна разработчикам еще одна универсальная модель (она нужна для повышения продуктивности их работы). И я знаком с описанием подобной (т.е. третьей) модели, ухватывающей:
· те сущностные особенности вещей,
· которые не ухватываются двумя уже в статье рассмотренными.
И если позволят жизненные обстоятельства, то я об этом поговорю в отдельной статье.
Обнинск, декабрь 2010 г. Ключ В.Е.
[1] См. http://metodolog.ru/node/727, 730, 737
[2] Конечно, из-за наличия внешних контуров оргуправления, имеет место разделение всей ОУМ между внутренним и внешним органами управления.
[3] Разницей в терминах подчеркивается еще и разница в "мировоззренческих" подходах. Использованием термина "МОУ" как бы подчеркивается пассивная роль ТС в управлении, тот момент, что собственно управление остается в руках человека, использующего эту ТС. А используя термин ОУМ (УМ) я подчеркиваю тот момент, что при наличии управляющей программы весь ("почти") процесс управления может быть сосредоточен внутри ТС.
[4] Но это осуществимо только при том условии, что эта НС (тот же человек, например) имеет ОУМ такого высокого порядка, в котором заложены возможности такой импровизации!
[5] Конечно, в реальных ТС в составе ОУМ прописываются алгоритмы управляющих действий для достаточно ограниченного числа вариантов. Каким числом можно ограничиться, определяют на стадии разработки, исходя из имеющихся ресурсов и требований к ГПФ. Как раз здесь большие резервы совершенствования спрятаны в возможноностях улучшения (и разработки) "удачных" математических средств, позволяющих, используя минимум исходных сведений, получать максимум следствий, приходить к нужному состоянию минимумом управляющих действий. Здесь точка пересечения проблемы управления с математическими проблемами вычислимости (о чем шла речь в первой части пособия при рассказе о машине Тьюринга), здесь же начало таких наук, как кибернетика и др.
[6] Напомню еще раз, что сложность и объем задач управления данной ТС, которые закладываются при разработке в ее ОУМ и, соответственно, сложность "ОУ" этой ТС, зависит от того, в рамках какого гомотехнического автомата (автомата какой НС из ее вертикальной иерархии) мы это управление рассматриваем, какую долю всех этих процессов управления хотим в эту ОУ заложить. Здесь всегда есть ограничения, накладываемые (явно и неявно) самим разработчиком и условиями разработки (в том числе "заказом"). Среди них есть ограничения принципиальные. Ведь ТС, вещь - это всегда лишь подсистема некой Д. Мы сознательно ограничиваем "самостоятельность" ТС, мы, как деятели, никогда не захотим выпустить ее из-под своего контроля, стремимся оставить за собой вопросы целеполагания и использования ТС в рамках своего целеполагания и т.п.
[7] В этом плане такая часть ТРИЗа, как АРИЗ (алгоритм решения изобретательской задачи) – это тоже алгоритм действий в изобретательской ситуации, позволяющий найти техническое решение, разрешить имеющееся противоречие в Д. быстро и эффективно с помощью имеющихся банков изобретательских знаний, но этот алгоритм создан для использования не в ОУ ТС, а изобретателем.
Однако, благодаря подробной технической его проработке, формализации многих процедур и т.п., он может быть положен в основу функционирования разного рода ИЗОБРЕТАТЕЛЬСКИХ машин, где АРИЗ частично будет опредмечен, а частично будет выступать как ОУМ такой "изобретающей" ТС (с той или иной долей участия человека).
[8] Напомню, что базовыми процессами в этом блоке являются процедуры "отображения" и "сравнения". Надо бы о них особо вести речь, но это – за пределами статьи.
[9] Именно поэтому на схеме ОУ использовано множественное число ("этажи" ОУ). О численности этажей должен быть разговор особый. А здесь укажу, что для управленческой части, включенной в ТС (т.е. внутренней) наиболее рационально такое "техническое" разделение этажей собственно управления (принятия решений).
"В самом низу", на первом уровне управления часть контуров управления свертывается до АВТОРЕГУЛИРОВАНИЯ, осуществляемого с помощью автономных регуляторов. Они осуществляют управляющие воздействия однозначно, без процедуры выбора решения (выбора из нескольких вариантов ответов).
В следующем этаже управления находятся контура, принимающие решения путем выбора какого-то одного из небольшого числа содержащихся в ОУМ решений, т.е. это – этаж "периферийного" управления.
Наконец, этаж центрального управления, по "полной", предусмотренной в ОУМ программе принятия решений.
Нужно заметить, что этаж центрального управления тоже обычно "иерархизируется", имеет несколько уровней.